§2.6 Kinetic energy. Kinetic energy Law of conservation and transformation of energy
Energy is a scalar physical quantity that is a unified measure of various forms of motion of matter and a measure of the transition of the motion of matter from one form to another.
To characterize various forms of motion of matter, the corresponding types of energy are introduced, for example: mechanical, internal, energy of electrostatic, intranuclear interactions, etc.
Energy obeys the law of conservation, which is one of the most important laws of nature.
Mechanical energy E characterizes the movement and interaction of bodies and is a function of the speeds and relative positions of bodies. It is equal to the sum of kinetic and potential energies.
Kinetic energy
Let us consider the case when a body of mass m there is a constant force \(~\vec F\) (it can be the resultant of several forces) and the vectors of force \(~\vec F\) and displacement \(~\vec s\) are directed along one straight line in one direction. In this case, the work done by the force can be defined as A = F∙s. The modulus of force according to Newton's second law is equal to F = m∙a, and the displacement module s in uniformly accelerated rectilinear motion is associated with the modules of the initial υ 1 and final υ 2 speeds and accelerations A expression \(~s = \frac(\upsilon^2_2 - \upsilon^2_1)(2a)\) .
From here we get to work
\(~A = F \cdot s = m \cdot a \cdot \frac(\upsilon^2_2 - \upsilon^2_1)(2a) = \frac(m \cdot \upsilon^2_2)(2) - \frac (m \cdot \upsilon^2_1)(2)\) . (1)
A physical quantity equal to half the product of a body’s mass and the square of its speed is called kinetic energy of the body.
Kinetic energy is represented by the letter E k.
\(~E_k = \frac(m \cdot \upsilon^2)(2)\) . (2)
Then equality (1) can be written as follows:
\(~A = E_(k2) - E_(k1)\) . (3)
Kinetic energy theorem
the work of the resultant forces applied to the body is equal to the change in the kinetic energy of the body.
Since the change in kinetic energy is equal to the work of force (3), the kinetic energy of the body is expressed in the same units as the work, i.e. in joules.
If the initial speed of movement of a body of mass m is zero and the body increases its speed to the value υ , then the work done by the force is equal to the final value of the kinetic energy of the body:
\(~A = E_(k2) - E_(k1)= \frac(m \cdot \upsilon^2)(2) - 0 = \frac(m \cdot \upsilon^2)(2)\) . (4)
Physical meaning of kinetic energy
The kinetic energy of a body moving with a speed v shows how much work must be done by a force acting on a body at rest in order to impart this speed to it.
Potential energy
Potential energy is the energy of interaction between bodies.
The potential energy of a body raised above the Earth is the energy of interaction between the body and the Earth by gravitational forces. The potential energy of an elastically deformed body is the energy of interaction of individual parts of the body with each other by elastic forces.
Potential are called strength, the work of which depends only on the initial and final position of a moving material point or body and does not depend on the shape of the trajectory.
In a closed trajectory, the work done by the potential force is always zero. Potential forces include gravitational forces, elastic forces, electrostatic forces and some others.
Powers, the work of which depends on the shape of the trajectory, are called non-potential. When a material point or body moves along a closed trajectory, the work done by the nonpotential force is not equal to zero.
Potential energy of interaction of a body with the Earth
Let's find the work done by gravity F t when moving a body of mass m vertically down from a height h 1 above the Earth's surface to a height h 2 (Fig. 1). If the difference h 1 – h 2 is negligible compared to the distance to the center of the Earth, then the force of gravity F t during body movement can be considered constant and equal mg.
Since the displacement coincides in direction with the gravity vector, the work done by gravity is equal to
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (5)
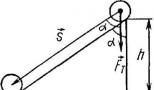
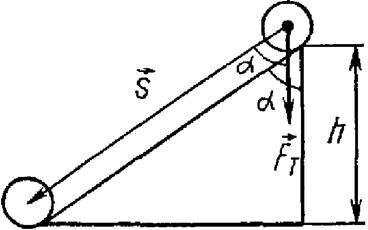
Let us now consider the movement of a body along an inclined plane. When moving a body down an inclined plane (Fig. 2), the force of gravity F t = m∙g does work
\(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
Where h– height of the inclined plane, s– displacement module equal to the length of the inclined plane.
Movement of a body from a point IN exactly WITH along any trajectory (Fig. 3) can be mentally imagined as consisting of movements along sections of inclined planes with different heights h’, h'' etc. Work A gravity all the way from IN V WITH equal to the sum of work on individual sections of the route:
\(~A = m \cdot g \cdot h" + m \cdot g \cdot h"" + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h" + h"" + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\), (7)
Where h 1 and h 2 – heights from the Earth’s surface at which the points are located, respectively IN And WITH.

Equality (7) shows that the work of gravity does not depend on the trajectory of the body and is always equal to the product of the gravity modulus and the difference in heights in the initial and final positions.
When moving downward, the work of gravity is positive, when moving up it is negative. The work done by gravity on a closed trajectory is zero.
Equality (7) can be represented as follows:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
A physical quantity equal to the product of the mass of a body by the acceleration modulus of free fall and the height to which the body is raised above the surface of the Earth is called potential energy interaction between the body and the Earth.
Work done by gravity when moving a body of mass m from a point located at a height h 2, to a point located at a height h 1 from the Earth's surface, along any trajectory, is equal to the change in the potential energy of interaction between the body and the Earth, taken with the opposite sign.
\(~A = - (E_(p2) - E_(p1))\) . (9)
Potential energy is indicated by the letter E p.
The value of the potential energy of a body raised above the Earth depends on the choice of the zero level, i.e., the height at which the potential energy is assumed to be zero. It is usually assumed that the potential energy of a body on the Earth's surface is zero.
With this choice of the zero level, the potential energy E p of a body located at a height h above the Earth's surface, equal to the product of the mass m of the body by the absolute acceleration of free fall g and distance h it from the surface of the Earth:
\(~E_p = m \cdot g \cdot h\) . (10)
The physical meaning of the potential energy of interaction of a body with the Earth
the potential energy of a body on which gravity acts is equal to the work done by gravity when moving the body to the zero level.
Unlike the kinetic energy of translational motion, which can only have positive values, the potential energy of a body can be both positive and negative. Body mass m, located at a height h, Where h < h 0 (h 0 – zero height), has negative potential energy:
\(~E_p = -m \cdot g \cdot h\) .
Potential energy of gravitational interaction
Potential energy of gravitational interaction of a system of two material points with masses m And M, located at a distance r one from the other is equal
\(~E_p = G \cdot \frac(M \cdot m)(r)\) . (eleven)
Where G is the gravitational constant, and the zero of the potential energy reference ( E p = 0) accepted at r = ∞.
Potential energy of gravitational interaction of a body with mass m with the Earth, where h– height of the body above the Earth’s surface, M e – mass of the Earth, R e is the radius of the Earth, and the zero of the potential energy reading is chosen at h = 0.
\(~E_e = G \cdot \frac(M_e \cdot m \cdot h)(R_e \cdot (R_e +h))\) . (12)
Under the same condition of choosing zero reference, the potential energy of gravitational interaction of a body with mass m with Earth for low altitudes h (h « R e) equal
\(~E_p = m \cdot g \cdot h\) ,
where \(~g = G \cdot \frac(M_e)(R^2_e)\) is the module of gravity acceleration near the Earth's surface.
Potential energy of an elastically deformed body
Let us calculate the work done by the elastic force when the deformation (elongation) of the spring changes from a certain initial value x 1 to final value x 2 (Fig. 4, b, c).

The elastic force changes as the spring deforms. To find the work done by the elastic force, you can take the average value of the force modulus (since the elastic force depends linearly on x) and multiply by the displacement module:
\(~A = F_(upr-cp) \cdot (x_1 - x_2)\) , (13)
where \(~F_(upr-cp) = k \cdot \frac(x_1 - x_2)(2)\) . From here
\(~A = k \cdot \frac(x_1 - x_2)(2) \cdot (x_1 - x_2) = k \cdot \frac(x^2_1 - x^2_2)(2)\) or \(~A = -\left(\frac(k \cdot x^2_2)(2) - \frac(k \cdot x^2_1)(2) \right)\) . (14)
A physical quantity equal to half the product of the rigidity of a body by the square of its deformation is called potential energy elastically deformed body:
\(~E_p = \frac(k \cdot x^2)(2)\) . (15)
From formulas (14) and (15) it follows that the work of the elastic force is equal to the change in the potential energy of an elastically deformed body, taken with the opposite sign:
\(~A = -(E_(p2) - E_(p1))\) . (16)
If x 2 = 0 and x 1 = X, then, as can be seen from formulas (14) and (15),
\(~E_p = A\) .
Physical meaning of the potential energy of a deformed body
the potential energy of an elastically deformed body is equal to the work done by the elastic force when the body transitions to a state in which the deformation is zero.
Potential energy characterizes interacting bodies, and kinetic energy characterizes moving bodies. Both potential and kinetic energy change only as a result of such interaction of bodies in which the forces acting on the bodies do work other than zero. Let us consider the question of energy changes during the interactions of bodies forming a closed system.
Closed system- this is a system that is not acted upon by external forces or the action of these forces is compensated. If several bodies interact with each other only by gravitational and elastic forces and no external forces act on them, then for any interactions of bodies, the work of the elastic or gravitational forces is equal to the change in the potential energy of the bodies, taken with the opposite sign:
\(~A = -(E_(p2) - E_(p1))\) . (17)
According to the kinetic energy theorem, the work done by the same forces is equal to the change in kinetic energy:
\(~A = E_(k2) - E_(k1)\) . (18)
From a comparison of equalities (17) and (18) it is clear that the change in the kinetic energy of bodies in a closed system is equal in absolute value to the change in the potential energy of the system of bodies and opposite in sign:
\(~E_(k2) - E_(k1) = -(E_(p2) - E_(p1))\) or \(~E_(k1) + E_(p1) = E_(k2) + E_(p2) \) . (19)
Law of conservation of energy in mechanical processes:
the sum of the kinetic and potential energy of the bodies that make up a closed system and interact with each other by gravitational and elastic forces remains constant.
The sum of the kinetic and potential energy of bodies is called total mechanical energy.
Let's give a simple experiment. Let's throw a steel ball up. By giving the initial speed υ inch, we will give it kinetic energy, which is why it will begin to rise upward. The action of gravity leads to a decrease in the speed of the ball, and hence its kinetic energy. But the ball rises higher and higher and acquires more and more potential energy ( E p = m∙g∙h). Thus, kinetic energy does not disappear without a trace, but is converted into potential energy.
At the moment of reaching the top point of the trajectory ( υ = 0) the ball is completely deprived of kinetic energy ( E k = 0), but at the same time its potential energy becomes maximum. Then the ball changes direction and moves downward with increasing speed. Now the potential energy is converted back into kinetic energy.
The law of conservation of energy reveals physical meaning concepts work:
the work of gravitational and elastic forces, on the one hand, is equal to an increase in kinetic energy, and on the other hand, to a decrease in the potential energy of bodies. Therefore, work is equal to energy converted from one type to another.
Mechanical Energy Change Law
If a system of interacting bodies is not closed, then its mechanical energy is not conserved. The change in mechanical energy of such a system is equal to the work of external forces:
\(~A_(vn) = \Delta E = E - E_0\) . (20)
Where E And E 0 – total mechanical energies of the system in the final and initial states, respectively.
An example of such a system is a system in which, along with potential forces, non-potential forces act. Non-potential forces include friction forces. In most cases, when the angle between the friction force F r body is π radians, the work done by the friction force is negative and equal to
\(~A_(tr) = -F_(tr) \cdot s_(12)\) ,
Where s 12 – body path between points 1 and 2.
Frictional forces during the movement of a system reduce its kinetic energy. As a result of this, the mechanical energy of a closed non-conservative system always decreases, turning into the energy of non-mechanical forms of motion.
For example, a car moving along a horizontal section of the road, after turning off the engine, travels some distance and stops under the influence of friction forces. The kinetic energy of the forward motion of the car became equal to zero, and the potential energy did not increase. When the car was braking, the brake pads, car tires and asphalt heated up. Consequently, as a result of the action of friction forces, the kinetic energy of the car did not disappear, but turned into the internal energy of thermal motion of molecules.
Law of conservation and transformation of energy
In any physical interaction, energy is transformed from one form to another.
Sometimes the angle between the friction force F tr and elementary displacement Δ r is equal to zero and the work of the friction force is positive:
\(~A_(tr) = F_(tr) \cdot s_(12)\) ,
Example 1. Let the external force F acts on the block IN, which can slide on the cart D(Fig. 5). If the cart moves to the right, then the work done by the sliding friction force F tr2 acting on the cart from the side of the block is positive:

Example 2. When a wheel rolls, its rolling friction force is directed along the movement, since the point of contact of the wheel with the horizontal surface moves in the direction opposite to the direction of movement of the wheel, and the work of the friction force is positive (Fig. 6):

Literature
- Kabardin O.F. Physics: Reference. materials: Textbook. manual for students. – M.: Education, 1991. – 367 p.
- Kikoin I.K., Kikoin A.K. Physics: Textbook. for 9th grade. avg. school – M.: Prosveshchenie, 1992. – 191 p.
- Elementary physics textbook: Proc. allowance. In 3 volumes / Ed. G.S. Landsberg: vol. 1. Mechanics. Heat. Molecular physics. – M.: Fizmatlit, 2004. – 608 p.
- Yavorsky B.M., Seleznev Yu.A. A reference guide to physics for those entering universities and self-education. – M.: Nauka, 1983. – 383 p.
Closely related to the concept of work is another fundamental physical concept – the concept of energy. Since mechanics studies, firstly, the movement of bodies, and secondly, the interaction of bodies with each other, it is customary to distinguish between two types of mechanical energy: kinetic energy, caused by the movement of the body, and potential energy, caused by the interaction of a body with other bodies.
Kinetic energy mechanical system called energydepending on the speed of movement of the points of this system.
An expression for kinetic energy can be found by determining the work of the resultant force applied to a material point. Based on (2.24), we write the formula for the elementary work of the resultant force:
Because  , then dA = mυdυ. (2.25)
, then dA = mυdυ. (2.25)
To find the work done by the resultant force when the speed of the body changes from υ 1 to υ 2, we integrate expression (2.29):
 (2.26)
(2.26)
Since work is a measure of the transfer of energy from one body to another, then
Based on (2.30), we write that the quantity  there is kinetic energy
there is kinetic energy
body:  whence instead of (1.44) we get
whence instead of (1.44) we get
 (2.27)
(2.27)
The theorem expressed by formula (2.30) is usually called kinetic energy theorem . In accordance with it, the work of forces acting on a body (or system of bodies) is equal to the change in the kinetic energy of this body (or system of bodies).
From the kinetic energy theorem it follows physical meaning of kinetic energy : The kinetic energy of a body is equal to the work that it is capable of doing in the process of reducing its speed to zero. The greater the “reserve” of kinetic energy a body has, the more work it can do.
The kinetic energy of a system is equal to the sum of the kinetic energies of the material points of which this system consists:
 (2.28)
(2.28)
If the work of all forces acting on the body is positive, then the kinetic energy of the body increases; if the work is negative, then the kinetic energy decreases.
It is obvious that the elementary work of the resultant of all forces applied to the body will be equal to the elementary change in the kinetic energy of the body:
dA = dE k. (2.29)
In conclusion, we note that kinetic energy, like the speed of movement, is relative. For example, the kinetic energy of a passenger sitting on a train will be different if we consider the movement relative to the road surface or relative to the carriage.
§2.7 Potential energy
The second type of mechanical energy is potential energy – energy due to the interaction of bodies.
Potential energy does not characterize any interaction of bodies, but only that which is described by forces that do not depend on speed. Most forces (gravity, elasticity, gravitational forces, etc.) are just that; the only exception is friction forces. The work of the forces under consideration does not depend on the shape of the trajectory, but is determined only by its initial and final positions. The work done by such forces on a closed trajectory is zero.
Forces whose work does not depend on the shape of the trajectory, but depends only on the initial and final position of the material point (body) are called potential or conservative forces .
If a body interacts with its environment through potential forces, then the concept of potential energy can be introduced to characterize this interaction.
Potential is the energy caused by the interaction of bodies and depending on their relative position.
Let's find the potential energy of a body raised above the ground. Let a body of mass m move uniformly in a gravitational field from position 1 to position 2 along a surface whose cross-section by the plane of the drawing is shown in Fig. 2.8. This section is the trajectory of a material point (body). If there is no friction, then three forces act on the point:
1) force N from the surface is normal to the surface, the work of this force is zero;
2) gravity mg, the work of this force A 12;
3) traction force F from some driving body (internal combustion engine, electric motor, person, etc.); Let's denote the work of this force by A T.
Let's consider the work of gravity when moving a body along an inclined plane of length ℓ (Fig. 2.9). As can be seen from this figure, the work is equal to
A" = mgℓ cosα = mgℓ cos(90° + α) = - mgℓ sinα
From triangle ВСD we have ℓ sinα = h, so from the last formula it follows:
The trajectory of a body (see Fig. 2.8) can be schematically represented by small sections of an inclined plane, therefore, for the work of gravity on the entire trajectory 1 -2, the following expression is valid:
A 12 =mg (h 1 -h 2) =-(mg h 2 - mg h 1) (2.30)
So, the work of gravity does not depend on the trajectory of the body, but depends on the difference in the heights of the starting and ending points of the trajectory.
Size
e n = mg h (2.31)
called potential energy a material point (body) of mass m raised above the ground to a height h. Therefore, formula (2.30) can be rewritten as follows:
A 12 = =-(En 2 - En 1) or A 12 = =-ΔEn (2.32)
The work of gravity is equal to the change in the potential energy of bodies taken with the opposite sign, i.e. the difference between its final and initialvalues (potential energy theorem ).
Similar reasoning can be given for an elastically deformed body.
 (2.33)
(2.33)
Note that the difference in potential energies has a physical meaning as a quantity that determines the work of conservative forces. In this regard, it does not matter to which position, configuration, zero potential energy should be attributed.
One very important corollary can be obtained from the potential energy theorem: Conservative forces are always directed towards decreasing potential energy. The established pattern is manifested in the fact that any system left to itself always tends to move into a state in which its potential energy has the least value. This is principle of minimum potential energy .
If a system in a given state does not have minimum potential energy, then this state is called energetically unfavorable.
If the ball is at the bottom of a concave bowl (Fig. 2.10, a), where its potential energy is minimal (compared to its values in neighboring positions), then its state is more favorable. The equilibrium of the ball in this case is sustainable: If you move the ball to the side and release it, it will return to its original position.
For example, the position of the ball on the top of a convex surface is energetically unfavorable (Fig. 2.10, b). The sum of the forces acting on the ball is zero, and therefore this ball will be in equilibrium. However, this balance is unstable: the slightest impact is enough for it to roll down and thereby move into a state that is energetically more favorable, i.e. having less
P  potential energy.
potential energy.
At indifferent In equilibrium (Fig. 2.10, c), the potential energy of a body is equal to the potential energy of all its possible nearest states.
In Figure 2.11, you can indicate some limited region of space (for example cd), in which the potential energy is less than outside it. This area was named potential well .
If the elementary displacement d is written in the form:
According to Newton's II law:
The quantity is called kinetic energy
The work of the resultant of all forces acting on a particle is equal to the change in the kinetic energy of the particle.
or another entry
kinetic dissipative scalar physical
If A > 0, then WC increases (falls)
If A > 0, then WC decreases (throwing).
Moving bodies have the ability to do work even if no forces from other bodies act on them. If a body moves at a constant speed, then the sum of all forces acting on the body is equal to 0 and no work is done. If a body acts with some force in the direction of motion on another body, then it is able to do work. In accordance with Newton's third law, a force of the same magnitude will be applied to a moving body, but directed in the opposite direction. Thanks to the action of this force, the speed of the body will decrease until it comes to a complete stop. The energy WC caused by the motion of a body is called kinetic. A completely stopped body cannot perform work. WC depends on speed and body weight. Changing the direction of speed does not affect kinetic energy.
Energy is a scalar quantity. The SI unit of energy is the Joule.
Kinetic and potential energy
There are two types of energy - kinetic and potential.
DEFINITION
Kinetic energy- this is the energy that a body possesses due to its movement:
DEFINITION
Potential energy is energy that is determined by the relative position of bodies, as well as the nature of the interaction forces between these bodies.
Potential energy in the Earth's gravitational field is the energy due to the gravitational interaction of a body with the Earth. It is determined by the position of the body relative to the Earth and is equal to the work of moving the body from a given position to the zero level:
Potential energy is the energy caused by the interaction of body parts with each other. It is equal to the work of external forces in tension (compression) of an undeformed spring by the amount:
A body can simultaneously possess both kinetic and potential energy.
The total mechanical energy of a body or system of bodies is equal to the sum of the kinetic and potential energies of the body (system of bodies):
Law of energy conservation
For a closed system of bodies, the law of conservation of energy is valid:
In the case when a body (or a system of bodies) is acted upon by external forces, for example, the law of conservation of mechanical energy is not satisfied. In this case, the change in the total mechanical energy of the body (system of bodies) is equal to the external forces:
The law of conservation of energy allows us to establish a quantitative connection between various forms of motion of matter. Just like , it is valid not only for, but also for all natural phenomena. The law of conservation of energy says that energy in nature cannot be destroyed just as it cannot be created from nothing.
In its most general form, the law of conservation of energy can be formulated as follows:
- Energy in nature does not disappear and is not created again, but only transforms from one type to another.
Examples of problem solving
EXAMPLE 1
| Exercise | A bullet flying at a speed of 400 m/s hits an earthen shaft and travels 0.5 m to a stop. Determine the resistance of the shaft to the movement of the bullet if its mass is 24 g. |
| Solution | The resistance force of the shaft is an external force, so the work done by this force is equal to the change in the kinetic energy of the bullet: Since the resistance force of the shaft is opposite to the direction of movement of the bullet, the work done by this force is: Change in bullet kinetic energy: Thus, we can write: where does the resistance force of the earthen rampart come from: Let's convert the units to the SI system: g kg. Let's calculate the resistance force: |
| Answer | The shaft resistance force is 3.8 kN. |
EXAMPLE 2
| Exercise | A load weighing 0.5 kg falls from a certain height onto a plate weighing 1 kg, mounted on a spring with a stiffness coefficient of 980 N/m. Determine the magnitude of the greatest compression of the spring if at the moment of impact the load had a speed of 5 m/s. The impact is inelastic. |
| Solution | Let us write down a load + plate for a closed system. Since the impact is inelastic, we have: where does the speed of the plate with the load after impact come from:
According to the law of conservation of energy, the total mechanical energy of the load together with the plate after impact is equal to the potential energy of the compressed spring: |

Newton's first law postulates the presence of such a phenomenon as the inertia of bodies. Therefore it is also known as the Law of Inertia. Inertia is the phenomenon of a body maintaining its speed of movement (both in magnitude and direction) when no forces act on the body. To change the speed of movement, a certain force must be applied to the body. Naturally, the result of the action of forces of equal magnitude on different bodies will be different. Thus, bodies are said to have inertia. Inertia is the property of bodies to resist changes in their current state. The amount of inertia is characterized by body weight. There are such reference systems, called inertial, relative to which a material point, in the absence of external influences, retains the magnitude and direction of its speed indefinitely.
Newton's second law is a differential law of motion that describes the relationship between a force applied to a material point and the resulting acceleration of that point. In fact, Newton's second law introduces mass as a measure of the manifestation of inertia of a material point in the selected inertial reference frame (IFR). In an inertial reference frame, the acceleration that a material point receives is directly proportional to the resultant of all forces applied to it and inversely proportional to its mass.
Law of Thirds. This law explains what happens to two interacting bodies. Let us take for example a closed system consisting of two bodies. The first body can act on the second with some force, and the second can act on the first with force. How do the forces compare? Newton's third law states: the action force is equal in magnitude and opposite in direction to the reaction force. Let us emphasize that these forces are applied to different bodies, and therefore are not compensated at all. An action always has an equal and opposite reaction, otherwise the interactions of two bodies on each other are equal and directed in opposite directions.
4 ) The principle of relativity- a fundamental physical principle according to which all physical processes in inertial reference systems proceed in the same way, regardless of whether the system is stationary or in a state of uniform and rectilinear motion.
It follows that all laws of nature are the same in all inertial frames of reference.
There is a distinction between Einstein's principle of relativity (which is given above) and Galileo's principle of relativity, which states the same thing, but not for all laws of nature, but only for the laws of classical mechanics, implying the applicability of Galileo's transformations, leaving open the question of the applicability of the principle of relativity to optics and electrodynamics .
In modern literature, the principle of relativity in its application to inertial frames of reference (most often in the absence of gravity or when it is neglected) usually appears terminologically as Lorentz covariance (or Lorentz invariance).
5)Forces in nature.
Despite the variety of forces, there are only four types of interactions: gravitational, electromagnetic, strong and weak.
Gravitational forces are noticeably manifested on a cosmic scale. One of the manifestations of gravitational forces is the free fall of bodies. The earth imparts to all bodies the same acceleration, which is called the acceleration of gravity g. It varies slightly depending on geographic latitude. At the latitude of Moscow it is 9.8 m/s2.
Electromagnetic forces act between particles that have electrical charges. Strong and weak interactions manifest themselves inside atomic nuclei and in nuclear transformations.
Gravitational interaction exists between all bodies with masses. The law of universal gravitation, discovered by Newton, states:
The force of mutual attraction between two bodies, which can be taken as material points, is directly proportional to the product of their masses and inversely proportional to the square of the distance between them:
The proportionality coefficient y is called the gravitational constant. It is equal to 6.67 10-11 N m2/kg2.
If only the gravitational force from the Earth acts on the body, then it is equal to mg. This is the force of gravity G (without taking into account the rotation of the Earth). The force of gravity acts on all bodies on Earth, regardless of their movement.
When a body moves with the acceleration of gravity (or even with a lower acceleration directed downward), the phenomenon of complete or partial weightlessness is observed.
Complete weightlessness - no pressure on the stand or gimbal. Weight is the force of pressure of a body on a horizontal support or the tensile force of a thread from a body suspended from it, which arises in connection with the gravitational attraction of this body to the Earth.
The forces of attraction between bodies are indestructible, while the weight of the body can disappear. Thus, in a satellite that moves at escape velocity around the Earth, there is no weight, just like in an elevator falling with acceleration g.
Examples of electromagnetic forces are the forces of friction and elasticity. There are sliding friction forces and rolling friction forces. The sliding friction force is much greater than the rolling friction force.
The friction force depends in a certain interval on the applied force, which tends to move one body relative to another. By applying a force of varying magnitude, we will see that small forces cannot move the body. In this case, a compensating force of static friction arises.
In the absence of forces shifting the body, the static friction force is zero. The static friction force acquires its greatest significance at the moment when one body begins to move relative to another. In this case, the static friction force becomes equal to the sliding friction force:
![]()
where n is the coefficient of friction, N is the force of normal (perpendicular) pressure. The friction coefficient depends on the substance of the rubbing surfaces and their roughness.
6) Law of conservation of momentum ( The law of conservation of momentum) states that the vector sum of the impulses of all bodies (or particles) of a closed system is a constant quantity.
In classical mechanics, the law of conservation of momentum is usually derived as a consequence of Newton's laws. From Newton's laws it can be shown that when moving in empty space, momentum is conserved in time, and in the presence of interaction, the rate of its change is determined by the sum of the applied forces.
Like any of the fundamental conservation laws, the law of conservation of momentum describes one of the fundamental symmetries - the homogeneity of space.
Center of mass in mechanics- this is a geometric point that characterizes the movement of a body or a system of particles as a whole. The concept of center of mass is widely used in physics.
The motion of a rigid body can be considered as a superposition of the motion of the center of mass and the rotational motion of the body around its center of mass. In this case, the center of mass moves in the same way as a body with the same mass, but infinitely small dimensions (material point) would move. The latter means, in particular, that all Newton's laws are applicable to describe this movement. In many cases, you can completely ignore the size and shape of a body and consider only the movement of its center of mass. It is often convenient to consider the movement of a closed system in a reference system associated with the center of mass. Such a reference system is called the center of mass system (C-system), or the center of inertia system. In it, the total momentum of a closed system always remains equal to zero, which makes it possible to simplify the equations of its motion.
Energy- a scalar physical quantity, which is a unified measure of various forms of motion of matter and a measure of the transition of the motion of matter from one form to another. Mechanical work is a physical quantity that is a scalar quantitative measure of the action of a force or forces on a body or system, depending on the numerical magnitude and direction of the force (forces) and on the movement of the point (points) of the body or system. Energy is a measure of the ability of a physical system to perform work, Therefore, quantitatively, energy and work are expressed in the same units.
Mechanical work and mechanical energy are identified.
Power- a physical quantity equal to the ratio of work performed over a certain period of time to this period of time.
Kinetic energy- the energy of a mechanical system, depending on the speed of movement of its points. The kinetic energy of translational and rotational motion is often released. The SI unit of measurement is the Joule. More strictly, kinetic energy is the difference between the total energy of the system and its rest energy; Thus, kinetic energy is the part of the total energy due to motion.
Potential energy- a scalar physical quantity that characterizes the ability of a certain body (or material point) to do work due to its location in the field of action of forces. A correct definition of potential energy can only be given in a field of forces, the work of which depends only on the initial and final position of the body, but not on the trajectory of its movement. Such forces are called conservative. Potential energy is also a characteristic of the interaction of several bodies or a body and a field. Any physical system tends to a state with the lowest potential energy. The potential energy in the Earth's gravitational field near the surface is approximately expressed by the formula:
where Ep is the potential energy of the body, m is the mass of the body, g is the acceleration of gravity, h is the height of the center of mass of the body above an arbitrarily chosen zero level.
On the physical meaning of the concept of potential energy
If kinetic energy can be determined for one individual body, then potential energy always characterizes at least two bodies or the position of a body in an external field.
Kinetic energy is characterized by speed; potential - by the relative position of the bodies.
The main physical meaning is not the value of potential energy itself, but its change.
8) In physics, mechanical energy describes the sum of potential and kinetic energy available in the components of a mechanical system. Mechanical energy is the energy associated with the movement of an object or its position. Law of conservation of mechanical energy states that if a body or system is subjected to only conservative forces, then the total mechanical energy of that body or system remains constant. In an isolated system, where only conservative forces act, the total mechanical energy is conserved.
Related information.