§2.6 Кінетична енергія. Кінетична енергія Закон збереження та перетворення енергії
Енергієюназивається скалярна фізична величина, що є єдиною мірою різних форм руху матерії та мірою переходу руху матерії з одних форм до інших.
Для характеристики різних форм руху матерії вводяться відповідні види енергії, наприклад: механічна, внутрішня, електростатична енергія, внутрішньоядерних взаємодій та ін.
Енергія підпорядковується закону збереження, який одна із найважливіших законів природи.
Механічна енергія Е характеризує рух та взаємодію тіл і є функцією швидкостей та взаємного розташування тіл. Вона дорівнює сумі кінетичної та потенційної енергії.
Кінетична енергія
Розглянемо випадок, коли на тіло масою mдіє постійна сила \(~\vec F\) (вона може бути рівнодіє декількох сил) і вектори сили \(~\vec F\) і переміщення \(~\vec s\) спрямовані вздовж однієї прямої в одну сторону. У цьому випадку роботу сили можна визначити як A = F∙s. Модуль сили за другим законом Ньютона дорівнює F = m∙a, а модуль переміщення sпри рівноприскореному прямолінійному русі пов'язаний з початковими модулями υ 1 та кінцевої υ 2 швидкості та прискорення авиразом \(~s = \frac(\upsilon^2_2 - \upsilon^2_1)(2a)\) .
Звідси для роботи отримуємо
\(~A = F \cdot s = m \cdot a \cdot \frac(\upsilon^2_2 - \upsilon^2_1)(2a) = \frac(m \cdot \upsilon^2_2)(2) - \frac (m \cdot \upsilon^2_1)(2)\) . (1)
Фізична величина, що дорівнює половині добутку маси тіла на квадрат його швидкості, називається кінетичною енергією тіла.
Кінетична енергія позначається буквою E k.
\(~E_k = \frac(m \cdot \upsilon^2)(2)\) . (2)
Тоді рівність (1) можна записати у такому вигляді:
\(~A = E_(k2) - E_(k1)\) . (3)
Теорема про кінетичну енергію
робота рівнодіючої сил, прикладених до тіла, дорівнює зміні кінетичної енергії тіла.
Оскільки зміна кінетичної енергії дорівнює роботі сили (3), кінетична енергія тіла виражається у тих самих одиницях, як і робота, т. е. в джоулях.
Якщо початкова швидкість руху тіла масою mдорівнює нулю і тіло збільшує свою швидкість до значення υ , то робота сили дорівнює кінцевому значенню кінетичної енергії тіла:
\(~A = E_(k2) - E_(k1)= \frac(m \cdot \upsilon^2)(2) - 0 = \frac(m \cdot \upsilon^2)(2)\) . (4)
Фізичний сенс кінетичної енергії
кінетична енергія тіла, що рухається зі швидкістю υ, показує, яку роботу повинна здійснити сила, що діє на тіло, що спочиває, щоб повідомити йому цю швидкість.
Потенціальна енергія
Потенціальна енергія- Це енергія взаємодії тіл.
Потенційна енергія піднятого над Землею тіла – це енергія взаємодії тіла та Землі гравітаційними силами. Потенційна енергія пружно деформованого тіла – це енергія взаємодії окремих частин тіла між собою силами пружності.
Потенційниминазиваються силиробота яких залежить тільки від початкового і кінцевого положення рухомої матеріальної точки або тіла і не залежить від форми траєкторії.
При замкнутій траєкторії робота потенційної сили завжди дорівнює нулю. До потенційних сил відносяться сили тяжіння, сили пружності, електростатичні сили та деякі інші.
Сили, робота яких залежить від форми траєкторії, називаються непотенційними. При переміщенні матеріальної точки або тіла замкнутою траєкторією робота непотенційної сили не дорівнює нулю.
Потенційна енергія взаємодії тіла із Землею
Знайдемо роботу, що здійснюється силою тяжіння Fт при переміщенні тіла масою mвертикально вниз з висоти h 1 над поверхнею Землі до висоти h 2 (рис. 1). Якщо різниця h 1 – h 2 зневажливо мала в порівнянні з відстанню до центру Землі, то силу тяжіння Fт під час руху тіла можна вважати постійною та рівною mg.
Так як переміщення збігається у напрямку з вектором сили тяжіння, робота сили тяжіння дорівнює
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (5)
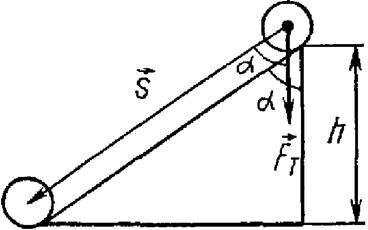
Розглянемо тепер рух тіла по похилій площині. При переміщенні тіла вниз по похилій площині (рис. 2) сила тяжіння Fт = m∙gздійснює роботу
(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
де h- Висота похилої площини, s– модуль переміщення, що дорівнює довжині похилої площини.
Рух тіла з точки Ув точку Зпо будь-якій траєкторії (рис. 3) можна подумки уявити що складається з переміщень по ділянках похилих площин з різними висотами h’, h'' і т. д. Робота Асили тяжіння на всьому шляху з Ув Здорівнює сумі робіт на окремих ділянках колії:
\(~A = m \cdot g \cdot h" + m \cdot g \cdot h"" + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h" + h"" + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\) , (7)
де h 1 та h 2 – висоти від поверхні Землі, на яких розташовані відповідно точки Уі З.

Рівність (7) показує, що робота сили тяжіння не залежить від траєкторії руху тіла і завжди дорівнює добутку модуля сили тяжіння на різницю висот у початковому та кінцевому положеннях.
При русі вниз робота сили тяжіння позитивна, під час руху вгору – негативна. Робота сили тяжіння на замкнутій траєкторії дорівнює нулю.
Рівність (7) можна представити у такому вигляді:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
Фізичну величину, рівну добутку маси тіла на модуль прискорення вільного падіння та на висоту, на яку піднято тіло над поверхнею Землі, називають потенційною енергієювзаємодії тіла та Землі.
Робота сили тяжіння при переміщенні тіла масою mз точки, розташованої на висоті h 2 в точку, розташовану на висоті h 1 від поверхні Землі, по будь-якій траєкторії дорівнює зміні потенційної енергії взаємодії тіла та Землі, взятому з протилежним знаком.
\(~A = - (E_(p2) - E_(p1))\) . (9)
Потенційна енергія позначається буквою Е p.
Значення потенційної енергії тіла, піднятого над Землею, залежить від вибору нульового рівня, тобто висоти, де потенційна енергія приймається рівної нулю. Зазвичай приймають, що потенційна енергія тіла лежить на поверхні Землі дорівнює нулю.
За такого вибору нульового рівня потенційна енергія Е p тіла, що знаходиться на висоті hнад поверхнею Землі, що дорівнює добутку маси m тіла на модуль прискорення вільного падіння gта відстань hйого від поверхні Землі:
\(~E_p = m \cdot g \cdot h\) . (10)
Фізичний зміст потенційної енергії взаємодії тіла із Землею
потенційна енергія тіла, на яке діє сила тяжіння, дорівнює роботі, що здійснюється силою тяжіння при переміщенні тіла на нульовий рівень.
На відміну від кінетичної енергії поступального руху, яка може мати лише позитивні значення, потенційна енергія тіла може бути як позитивною, так і негативною. Тіло масою m, що знаходиться на висоті h, де h < h 0 (h 0 – нульова висота), має негативну потенційну енергію:
\(~E_p = -m \cdot g \cdot h\) .
Потенційна енергія гравітаційної взаємодії
Потенційна енергія гравітаційної взаємодії системи двох матеріальних точок із масами mі М, що знаходяться на відстані rодна від одної, рівна
\(~E_p = G \cdot \frac(M \cdot m)(r)\) . (11)
де G– гравітаційна постійна, а нуль відліку потенційної енергії ( Е p = 0) прийнятий при r = ∞.
Потенційна енергія гравітаційної взаємодії тіла масою mіз Землею, де h- Висота тіла над поверхнею Землі, M e – маса Землі, R e – радіус Землі, а нуль відліку потенційної енергії обраний при h = 0.
\(~E_e = G \cdot \frac(M_e \cdot m \cdot h)(R_e \cdot (R_e +h))\) . (12)
За тієї ж умови вибору нуля відліку потенційна енергія гравітаційної взаємодії тіла масою mіз Землею для малих висот h (h « R e) дорівнює
\(~E_p = m \cdot g \cdot h\) ,
де \(~g = G \cdot \frac(M_e)(R^2_e)\) - модуль прискорення вільного падіння поблизу поверхні Землі.
Потенційна енергія пружно деформованого тіла
Обчислимо роботу, що здійснюється силою пружності при зміні деформації (подовження) пружини від деякого початкового значення x 1 до кінцевого значення x 2 (рис. 4, б, в).

Сила пружності змінюється у процесі деформації пружини. Для знаходження роботи сили пружності можна взяти середнє значення модуля сили (бо сила пружності лінійно залежить від x) і помножити на модуль переміщення:
\(~A = F_(upr-cp) \cdot (x_1 - x_2)\) , (13)
де \(~F_(upr-cp) = k \cdot \frac(x_1 - x_2)(2)\) . Звідси
\(~A = k \cdot \frac(x_1 - x_2)(2) \cdot (x_1 - x_2) = k \cdot \frac(x^2_1 - x^2_2)(2)\) або \(~A = -\left(\frac(k \cdot x^2_2)(2) - \frac(k \cdot x^2_1)(2) \right)\) . (14)
Фізична величина, що дорівнює половині добутку жорсткості тіла на квадрат його деформації, називається потенційною енергієюпружно деформованого тіла:
\(~E_p = \frac(k \cdot x^2)(2)\) . (15)
З формул (14) і (15) випливає, що робота сили пружності дорівнює зміні потенційної енергії пружно деформованого тіла, взятому з протилежним знаком:
\(~A = -(E_(p2) - E_(p1))\) . (16)
Якщо x 2 = 0 і x 1 = х, то, як видно з формул (14) та (15),
\(~E_p = A\) .
Фізичний зміст потенційної енергії деформованого тіла
потенційна енергія пружно деформованого тіла дорівнює роботі, яку здійснює сила пружності під час переходу тіла у стан, у якому деформація дорівнює нулю.
Потенційна енергія характеризує ті тіла, що взаємодіють, а кінетична енергія – тіла, що рухаються. І потенційна, і кінетична енергія змінюються тільки в результаті такої взаємодії тіл, при якому сили, що діють на тіла, виконують роботу, відмінну від нуля. Розглянемо питання про зміни енергії при взаємодіях тіл, що утворюють замкнуту систему.
Замкнута система- це система, на яку не діють зовнішні сили або дія цих сил компенсована. Якщо кілька тіл взаємодіють між собою тільки силами тяжіння і силами пружності і ніякі зовнішні сили на них не діють, то за будь-яких взаємодій тіл робота сил пружності або сил тяжіння дорівнює зміні потенційної енергії тіл, взятій із протилежним знаком:
\(~A = -(E_(p2) - E_(p1))\) . (17)
За теоремою про кінетичну енергію, робота тих же сил дорівнює зміні кінетичної енергії:
\(~A = E_(k2) - E_(k1)\) . (18)
З порівняння рівностей (17) і (18) видно, що зміна кінетичної енергії тіл у замкнутій системі дорівнює абсолютному значенню зміни потенційної енергії системи тіл і протилежно йому за знаком:
\(~E_(k2) - E_(k1) = -(E_(p2) - E_(p1))\) або \(~E_(k1) + E_(p1) = E_(k2) + E_(p2) \). (19)
Закон збереження енергії у механічних процесах:
сума кінетичної та потенційної енергії тіл, що становлять замкнуту систему і взаємодіють між собою силами тяжіння та силами пружності, залишається постійною.
Сума кінетичної та потенційної енергії тіл називається повною механічною енергією.
Наведемо найпростіший досвід. Підкинемо вгору сталеву кульку. Повідомивши початкову швидкість поч, ми надамо йому кінетичну енергію, через що він почне підніматися вгору. Дія сили тяжіння призводить до зменшення швидкості кульки, а отже, і її кінетичної енергії. Але кулька піднімається вище і вище і набуває все більше і більше потенційної енергії ( Е p = m∙g∙h). Таким чином, кінетична енергія не зникає безвісти, а відбувається її перетворення на потенційну енергію.
У момент досягнення верхньої точки траєкторії ( υ = 0) кулька повністю позбавляється кінетичної енергії ( Е k = 0), але при цьому його потенційна енергія стає максимальною. Далі кулька змінює напрямок руху і з швидкістю, що збільшується, рухається вниз. Тепер відбувається зворотне перетворення потенційної енергії на кінетичну.
Закон збереження енергії розкриває фізичний сенспоняття роботи:
робота сил тяжіння і сил пружності, з одного боку, дорівнює збільшенню кінетичної енергії, з другого боку, – зменшенню потенційної енергії тел. Отже, робота дорівнює енергії, що перетворилася з одного виду на інший.
Закон про зміну механічної енергії
Якщо система тіл, що взаємодіють, не замкнута, то її механічна енергія не зберігається. Зміна механічної енергії такої системи дорівнює роботі зовнішніх сил:
\(~A_(vn) = \Delta E = E - E_0\) . (20)
де Еі Е 0 – повні механічні енергії системи у кінцевому та початковому станах відповідно.
Прикладом такої системи може бути система, у якій поруч із потенційними силами діють непотенційні сили. До непотенційних сил належать сили тертя. У більшості випадків, коли кут між силою тертя F rтіла складає π радіан, робота сили тертя негативна і рівна
\(~A_(tr) = -F_(tr) \cdot s_(12)\) ,
де s 12 – шлях тіла між точками 1 та 2.
Сили тертя під час руху системи зменшують її кінетичну енергію. Внаслідок цього механічна енергія замкнутої неконсервативної системи завжди зменшується, переходячи в енергію немеханічних форм руху.
Наприклад, автомобіль, що рухався горизонтальною ділянкою дороги, після вимкнення двигуна проходить деякий шлях і під дією сил тертя зупиняється. Кінетична енергія поступального руху автомобіля стала рівною нулю, а потенційна енергія не збільшилася. Під час гальмування автомобіля відбулося нагрівання гальмівних колодок, шин автомобіля та асфальту. Отже, внаслідок дії сил тертя кінетична енергія автомобіля не зникла, а перетворилася на внутрішню енергію теплового руху молекул.
Закон збереження та перетворення енергії
за будь-яких фізичних взаємодіях енергія перетворюється з однієї форми на іншу.
Іноді кут між силою тертя F tr та елементарним переміщенням Δ rдорівнює нулю і робота сили тертя позитивна:
\(~A_(tr) = F_(tr) \cdot s_(12)\) ,
Приклад 1. Нехай зовнішня сила Fдіє на брусок У, який може ковзати по візку D(Рис. 5). Якщо візок переміщається вправо, то робота сили тертя ковзання F tr2 , що діє на візок з боку бруска, позитивна:

Приклад 2. При коченні колеса його сила тертя кочення спрямована вздовж руху, оскільки точка зіткнення колеса з горизонтальною поверхнею рухається у напрямку, протилежному напрямку руху колеса, і робота сили тертя позитивна (рис. 6):

Література
- Кабардін О.Ф. Фізика: Справ. матеріали: Навч. посібник для учнів. - М.: Просвітництво, 1991. - 367 с.
- Кікоїн І.К., Кікоїн А.К. Фізика: Навч. для 9 кл. середовищ. шк. - М.: Про-освіта, 1992. - 191 с.
- Елементарний підручник фізики: Навч. допомога. У 3 т. / за ред. Г.С. Ландсберг: т. 1. Механіка. Теплота. Молекулярна фізика - М.: Фізматліт, 2004. - 608 с.
- Яворський Б.М., Селезньов Ю.А. Довідковий посібник з фізики для вступників до вузів та самоосвіти. - М.: Наука, 1983. - 383 с.
З поняттям роботи міцно пов'язане інше фундаментальне фізичне поняття – поняття енергії. Оскільки в механіці вивчається, по-перше, рух тіл, а по-друге, взаємодія тіл між собою, то прийнято розрізняти два види механічної енергії: кінетичну енергію, обумовлену рухом тіла, та потенційну енергіюобумовлену взаємодією тіла з іншими тілами
Кінетичною енергією механічної системи називають енергію, звисить від швидкостей руху точок цієї системи.
Вираз для кінетичної енергії можна знайти, визначивши роботу рівнодіючої сили, що додається до матеріальної точки. На підставі (2.24) запишемо формулу для елементарної роботи рівнодіючої сили:
Так як  , то dА = mυdυ.
, то dА = mυdυ.
(2.25)
 (2.26)
(2.26)
Щоб знайти роботу рівнодіючої сили при зміні швидкості тіла від 1 до 2 проінтегруємо вираз (2.29):
Так як робота - міра передачі енергії від одного тіла іншому, то на  на підставі (2.30) запишемо, що величина
на підставі (2.30) запишемо, що величина
є кінетична енергія  тіла:
тіла:
 (2.27)
(2.27)
звідки замість (1.44) одержуємо Теорему, виражену формулою (2.30), прийнято називати теорема про кінетичну енергію
. Відповідно до неї робота сил, що діють на тіло (або систему тіл), дорівнює зміні кінетичної енергії цього тіла (або системи тіл). З теореми про кінетичну енергію випливає : фізичний сенс кінетичної енергіїкінетична енергія тіла дорівнює роботі, яку воно здатне здійснювати у процесі зменшення своєї швидкості до нуля.
Чим більший «запас» кінетичної енергії у тіла, тим більшу роботу воно здатне здійснити.
 (2.28)
(2.28)
Кінетична енергія системи дорівнює сумі кінетичних енергій матеріальних точок, з яких ця система складається:
Якщо робота всіх сил, які діють тіло, позитивна, то кінетична енергія тіла зростає, якщо робота негативна, то кінетична енергія зменшується.
Очевидно, що елементарна робота рівнодіючої всіх прикладених до тіла сил дорівнюватиме елементарній зміні кінетичної енергії тіла:
dА = dЕ к. (2.29)
На закінчення зауважимо, що кінетична енергія, як і швидкість руху, має відносний характер. Наприклад, кінетична енергія пасажира, що сидить у поїзді, буде різною, якщо розглядати рух щодо полотна дороги або вагона.
§2.7 Потенційна енергія Другим видом механічної енергії є потенціальна енергія
Потенційна енергія характеризує не будь-яку взаємодію тіл, а лише таку, яка описується силами, які не залежать від швидкості. Більшість сил (сила тяжкості, сила пружності, гравітаційні сили тощо) саме такі; винятком є лише сили тертя. Робота аналізованих сил залежить від форми траєкторії, а визначається лише її початковим і кінцевим становищем. Робота таких сил на замкнутій траєкторії дорівнює нулю.
Сили, робота яких залежить від форми траєкторії, а залежить лише від початкового і кінцевого становища матеріальної точки (тіла) називають потенційними чи консервативними силами .
Якщо тіло взаємодіє зі своїм оточенням у вигляді потенційних сил, то характеристики цієї взаємодії можна запровадити поняття потенційної енергії.
потенційної називають енергію, обумовлену взаємодією тіл і залежить від їхнього взаємного розташування.
Знайдемо потенційну енергію тіла, піднятого над землею. Нехай тіло масою m рівномірно переміщається в гравітаційному полі з положення 1 положення 2 по поверхні, переріз якої площиною креслення показано на рис. 2.8. Цей переріз є траєкторією матеріальної точки (тіла). Якщо тертя відсутнє, то на точку діють три сили:
1) сила N з боку поверхні нормально поверхні, робота цієї сили дорівнює нулю;
2) сила тяжіння mg, робота цієї сили А12;
3) сила тяги F з боку деякого рушійного тіла (двигун внутрішнього згоряння, електродвигун, людина тощо); роботу цієї сили позначимо АТ.
Розглянемо роботу сили тяжіння при переміщенні тіла вздовж похилої площини завдовжки ℓ (рис. 2.9). Як видно з цього малюнка, робота дорівнює
А" = mgℓ соsα = mgℓ соs(90° + α) = - mgℓ sinα
З трикутника ВСD маємо ℓ sinα = h, тому з останньої формули випливає:
Траєкторію руху тіла (див. рис. 2.8) можна схематично представити невеликими ділянками похилої площини, тому для роботи сили тяжіння на всій траєкторії 1 -2 справедливий вираз
A 12 = mg (h 1 -h 2) =-(mg h 2 - mg h 1) (2.30)
Отже, робота сили тяжіння не залежить від траєкторії тіла, а залежить від відмінності у висотах розташування початкової та кінцевої точок траєкторії.
Величину
е п = mg h (2.31)
називають потенційною енергією матеріальної точки (тіла) масою m піднятою над землею на висоту h. Отже, формулу (2.30) можна переписати так:
A 12 = =-(En 2 - En 1) або A 12 = =-ΔEn (2.32)
Робота сили тяжіння дорівнює взятій зі зворотним знаком зміні потенційної енергії тіл, тобто різниці її кінцевого та початковогозначень (теорема про потенційну енергію ).
Подібні міркування можна навести і для деформованого пружно тіла.
 (2.33)
(2.33)
Зазначимо, що фізичний сенс має різницю потенційних енергій як величина, що визначає роботу консервативних сил. У зв'язку з цим байдуже, якому становищу, зміни, слід приписати нульову потенційну енергію.
З теореми про потенційну енергію можна отримати одне дуже важливе наслідок: Консервативні сили завжди спрямовані у бік зменшення потенційної енергії.Встановлена закономірність проявляється у тому, що Будь-яка система, надана собі, завжди прагне перейти у такий стан, у якому її потенційна енергія має найменше значення.У цьому полягає принцип мінімуму потенційної енергії .
Якщо система в даному стані не має мінімальної потенційної енергії, то цей стан називають енергетично невигідним.
Якщо кулька знаходиться на дні увігнутої чаші (рис.2.10,а), де її потенційна енергія мінімальна (порівняно з її значеннями в сусідніх положеннях), то його стан вигідніший. Рівновага кульки в цьому випадку є стійким: якщо змістити кульку вбік і відпустити, то вона знову повернеться у своє початкове положення.
Енергетично невигідним, наприклад, є положення кульки на вершині опуклої поверхні (рис.2.10 б). Сума сил, що діють при цьому на кульку, дорівнює нулю, і тому ця кулька буде в рівновазі. Однак рівновага це є нестійким: досить найменшого впливу, що він скотився вниз і цим перейшов у стан енергетично вигідніше, тобто. що володіє меншою
п  віденційною енергією.
віденційною енергією.
При байдужерівноваги (рис. 2.10, в) потенційна енергія тіла дорівнює потенційній енергії всіх його можливих найближчих станів.
На малюнку 2.11 можна вказати деяку обмежену область простору (наприклад cd), у якій потенційна енергія менша, ніж поза нею. Ця область отримала назву потенційної ями .
Якщо елементарне переміщення d записати у вигляді:
За II законом Ньютона:
Величина називається кінетичною енергією
Робота рівнодіючої всіх сил, що діють на частинку, дорівнює зміні кінетичної енергії частки.
або інший запис
кінетичний дисипативний скалярний фізичний
Якщо A> 0, то WК зростає (падіння)
Якщо A > 0, WК зменшується (кидання).
Ті, що рухаються, мають здатність виконувати роботу і в тому випадку, якщо ніякі сили з боку інших тіл на них не діють. Якщо тіло рухається з постійною швидкістю, то сума всіх сил, що діють на тіло, дорівнює 0 і робота при цьому не здійснюється. Якщо тіло діятиме з деякою силою у напрямку руху на інше тіло, тоді воно здатне здійснити роботу. Відповідно до ІІІ закону Ньютона до тіла, що рухається, буде докладена така ж за величиною сила, але спрямована в протилежний бік. Завдяки дії цієї сили швидкість тіла зменшуватиметься до його повної зупинки. Енергія WК, обумовлена рухом тіла, називається кінетичною. Тіло, що повністю зупинилося, не може зробити роботи. WК залежить від швидкості та маси тіла. Зміна напрямку швидкості не впливає на кінетичну енергію.
Енергія – скалярна величина. У системі СІ одиницею виміру енергії є Джоуль.
Кінетична та потенційна енергія
Розрізняють два види енергії – кінетичну та потенційну.
ВИЗНАЧЕННЯ
Кінетична енергія– це енергія, яку тіло має внаслідок свого руху:
ВИЗНАЧЕННЯ
Потенціальна енергія– це енергія, що визначається взаємним розташуванням тіл, і навіть характером сил взаємодії між цими тілами.
Потенційна енергія у полі тяжіння Землі – це енергія, зумовлена гравітаційним взаємодією тіла із Землею. Вона визначається положенням тіла щодо Землі і дорівнює роботі з переміщення тіла з цього положення на нульовий рівень:
Потенційна енергія – енергія, зумовлена взаємодією частин тіла друг з одним. Вона дорівнює роботі зовнішніх сил з розтягування (стиснення) недеформованої пружини на величину:
Тіло може одночасно мати і кінетичну, і потенційну енергію.
Повна механічна енергія тіла або системи тіл дорівнює сумі кінетичної та потенційної енергії тіла (системи тіл):
Закон збереження енергії
Для замкнутої системи тіл справедливий закон збереження енергії:
У разі коли на тіло (або систему тіл) діють зовнішні сили, наприклад, закон збереження механічної енергії не виконується. У цьому випадку зміна повної механічної енергії тіла (системи тіл) дорівнює зовнішнім силам:
Закон збереження енергії дозволяє встановити кількісний зв'язок між різними формами руху матерії. Так само, як і , він справедливий не тільки для , але і для всіх явищ природи. Закон збереження енергії говорить про те, що в енергію в природі не можна знищити так само, як створити нічого.
У найбільш загальному вигляді закон збереження енергії можна сформулювати так:
- енергія в природі не зникає і не створюється знову, а лише перетворюється з одного виду на інший.
Приклади розв'язання задач
ПРИКЛАД 1
| Завдання | Куля, що летить зі швидкістю 400 м/с, потрапляє в земляний вал і проходить до зупинки 0,5 м. Визначити опір валу руху кулі, якщо її маса 24 г. |
| Рішення | Сила опору валу – це зовнішня сила, тому робота цієї сили дорівнює зміні кінетичної енергії кулі: Оскільки сила опору валу протилежна напрямку руху кулі, робота цієї сили: Зміна кінетичної енергії кулі: Таким чином, можна записати: звідки сила опору земляного валу: Переведемо одиниці до системи СІ: г кг. Обчислимо силу опору: |
| Відповідь | Сила опору валу 3,8 кн. |
ПРИКЛАД 2
| Завдання | Вантаж масою 0,5 кг падає з деякої висоти плиту масою 1 кг, укріплену на пружині з коефіцієнтом жорсткості 980 Н/м. Визначити величину найбільшого стиснення пружини, якщо в момент удару вантаж мав швидкість 5 м/с. Удар непружний. |
| Рішення | Запишемо для замкнутої системи груз+плита. Оскільки удар непружний, маємо: звідки швидкість плити з вантажем після удару:
За законом збереження енергії повна механічна енергія вантажу разом із плитою після удару дорівнює потенційній енергії стиснутої пружини: |

Перший закон Ньютона постулює наявність такого явища як інерція тіл. Тому він також відомий як Закон інерції. Інерція - це збереження тілом швидкості руху (і за величиною, і за напрямом), коли на тіло не діють ніякі сили. Щоб змінити швидкість руху, на тіло необхідно подіяти з певною силою. Звичайно, результат дії однакових за величиною сил на різні тіла буде різним. Таким чином, кажуть, що тіла мають інертність. Інертність - це властивість тіл чинити опір зміні їхнього поточного стану. Розмір інертності характеризується масою тіла. Існують такі системи відліку, звані інерціальними, щодо яких матеріальна точка за відсутності зовнішніх впливів зберігає величину та напрямок своєї швидкості необмежено довго.
Другий закон Ньютона - диференціальний закон руху, що описує взаємозв'язок між прикладеною до матеріальної точки силою і прискоренням цієї точки, що виходить від цього. Фактично, другий закон Ньютона вводить масу як міру прояву інертності матеріальної точки у вибраній інерційній системі відліку (ІСО). В інерційній системі відліку прискорення, яке отримує матеріальна точка, прямо пропорційно рівнодіє всіх доданих до неї сил і обернено пропорційно її масі.
Третій закон. Цей закон пояснює, що відбувається з двома взаємодіючими тілами. Візьмемо для прикладу замкнуту систему, що складається із двох тіл. Перше тіло може діяти друге з деякою силою, а друге - перше із силою. Як співвідносяться сили? Третій закон Ньютона стверджує: сила дії дорівнює модулю і протилежна за напрямом силі протидії. Наголосимо, що ці сили прикладені до різних тіл, а тому зовсім не компенсуються. Дію завжди є рівна і протилежна протидія, інакше - взаємодії двох тіл один на одного рівні та спрямовані в протилежні сторони.
4 ) Принцип відносності- фундаментальний фізичний принцип, за яким усі фізичні процеси в інерційних системах відліку протікають однаково, незалежно від цього, нерухома система чи вона перебуває у стані рівномірного і прямолінійного руху.
Звідси випливає, що це закони природи однакові в усіх інерційних системах відліку.
Розрізняють принцип відносності Ейнштейна (який наведено вище) і принцип відносності Галілея, який стверджує те ж саме, але не для всіх законів природи, а тільки для законів класичної механіки, маючи на увазі застосовність перетворень Галілея, залишаючи відкритим питання щодо застосування принципу відносності до оптики та електродинаміки .
У сучасній літературі принцип відносності в його застосуванні до інерційних систем відліку (найчастіше за відсутності гравітації або зневаги нею) зазвичай виступає термінологічно як лоренц-коваріантність (або лоренц-інваріантність).
5)Сили у природі.
Незважаючи на різноманітність сил, є всього чотири типи взаємодій: гравітаційна, електромагнітна, сильна і слабка.
Гравітаційні сили помітно проявляються у космічних масштабах. Одним із проявів гравітаційних сил є вільне падіння тіл. Земля повідомляє всім тілам те саме прискорення, яке називають прискоренням вільного падіння g. Воно трохи змінюється залежно від географічної широти. На широті Москви воно дорівнює 9,8 м/с2.
Електромагнітні сили діють між частинками, які мають електричні заряди. Сильні та слабкі взаємодії проявляються всередині атомних ядер та в ядерних перетвореннях.
Гравітаційна взаємодія існує між усіма тілами, які мають маси. Закон всесвітнього тяжіння, відкритий Ньютоном, каже:
Сила взаємного тяжіння двох тіл, які можуть бути прийнятими за матеріальні точки, прямо пропорційна добутку їх мас і обернено пропорційна квадрату відстані між ними:
Коефіцієнт пропорційності називають гравітаційною постійною. Вона дорівнює 6,6710-11 Н м2/кг2.
Якщо тіло діє лише гравітаційна сила із боку Землі, вона дорівнює mg. Це сила тяжкості G (без урахування обертання Землі). Сила тяжіння діє на всі тіла, що знаходяться на Землі, незалежно від їхнього руху.
При русі тіла з прискоренням вільного падіння (або навіть з меншим прискоренням, спрямованим униз) спостерігається явище повної чи часткової невагомості.
Повна невагомість – відсутність тиску на підставку чи на підвіс. Вага - сила тиску тіла на горизонтальну опору або сила розтягнення нитки з боку підвішеного до неї тіла, що виникає у зв'язку з гравітаційним тяжінням даного тіла до Землі.
Сили тяжіння між тілами не знищені, тоді як вага тіла може зникнути. Так, у супутнику, який рухається з першою космічною швидкістю навколо Землі, вага відсутня так само, як у ліфті, що падає з прискоренням g.
Прикладом електромагнітних сил є сили тертя та пружності. Розрізняють сили тертя ковзання та сили тертя кочення. Сила тертя ковзання набагато більша за силу тертя кочення.
Сила тертя залежить у певному інтервалі від докладеної сили, яка прагне зрушити одне тіло щодо іншого. Прикладаючи різну за величиною силу, побачимо, що невеликі сили що неспроможні зрушити тіло. У цьому виникає компенсуюча сила тертя спокою.
За відсутності сил, що зрушують тіло, сила тертя спокою дорівнює нулю. Найбільшого значення сила тертя спокою набуває у момент, коли одне тіло починає рухатися щодо іншого. В цьому випадку сила тертя спокою стає рівною силі тертя ковзання:
![]()
де n – коефіцієнт тертя, N – сила нормального (перпендикулярного) тиску. Коефіцієнт тертя залежить від речовини поверхонь, що труться, і їх шорсткості.
6) Закон збереження імпульсу (Закон збереження кількості руху) стверджує, що векторна сума імпульсів всіх тіл (або частинок) замкнутої системи є постійна величина.
У класичній механіці закон збереження імпульсу зазвичай виводиться як законів Ньютона. p align="justify"> З законів Ньютона можна показати, що при русі в порожньому просторі імпульс зберігається в часі, а за наявності взаємодії швидкість його зміни визначається сумою докладених сил.
Як і будь-який із фундаментальних законів збереження, закон збереження імпульсу описує одну з фундаментальних симетрій - однорідність простору.
Центр мас у механіці- це геометрична точка, що характеризує рух тіла чи системи частинок як цілого. обіймання центру мас широко використовується у фізиці.
Рух твердого тіла можна як суперпозицію руху центру мас і обертального руху тіла навколо його центру мас. Центр мас при цьому рухається так, як рухалося б тіло з такою ж масою, але нескінченно малими розмірами (матеріальна точка). Останнє означає, зокрема, що з опису цього руху застосовні закони Ньютона. У багатьох випадках можна взагалі не враховувати розміри і форму тіла і розглядати лише рух центру мас. Часто буває зручно розглядати рух замкнутої системи в системі відліку, пов'язаної з центром мас. Така система відліку називається системою центру мас (Ц-система), або системою центру інерції. У ній повний імпульс замкнутої системи залишається рівним нулю, що дозволяє спростити рівняння її руху.
Енергія- скалярна фізична величина, що є єдиною мірою різних форм руху матерії та мірою переходу руху матерії з одних форм до інших. Механічна робота- це фізична величина, що є скалярною кількісною мірою дії сили або сил на тіло або систему, яка залежить від чисельної величини та напряму сили (сил) та від переміщення точки (точок) тіла або системи. Енергіяє мірою здатності фізичної системи здійснити роботу,тому кількісно енергія та робота виражаються в одних одиницях.
Механічна робота та механічна енергія ототожнюються.
Потужність- фізична величина, що дорівнює відношенню роботи, яка виконується за деякий проміжок часу, до цього проміжку часу.
Кінетична енергія- Енергія механічної системи, яка залежить від швидкостей руху її точок. Часто виділяють кінетичну енергію поступального та обертального руху. Одиниця виміру в системі СІ - Джоуль. Більш строго, кінетична енергія є різниця між повною енергією системи та її енергією спокою; таким чином, кінетична енергія – частина повної енергії, обумовлена рухом.
Потенціальна енергія- скалярна фізична величина, що характеризує здатність якогось тіла (чи матеріальної точки) виконувати роботу з допомогою його перебування у полі дії сил. Коректне визначення потенційної енергії може бути дано лише у полі сил, робота яких залежить тільки від початкового та кінцевого положення тіла, але не від траєкторії його переміщення. Такі сили називаються консервативними. Також потенційна енергія є характеристикою взаємодії кількох тіл або тіла і поля. Будь-яка фізична система прагне стану з найменшою потенційною енергією. Потенційна енергія в полі тяжіння Землі поблизу поверхні приблизно виражається формулою:
де Ep – потенційна енергія тіла, m – маса тіла, g – прискорення вільного падіння, h – висота положення центру мас тіла над довільно обраним нульовим рівнем.
Про фізичний сенс поняття потенційної енергії
Якщо кінетична енергія може бути визначена для одного окремого тіла, то потенційна енергія завжди характеризує як мінімум два тіла або положення тіла у зовнішньому полі.
Кінетична енергія характеризується швидкістю; потенційна – взаєморозташуванням тел.
Основний фізичний сенс має саме значення потенційної енергії, та її зміна.
8) У фізиці механічна енергія описує суму потенційної та кінетичної енергії, що є в компонентах механічної системи. Механічна енергія - це енергія, що з рухом об'єкта чи його становищем. Закон збереження механічної енергіїстверджує, що й тіло чи система піддається дії лише консервативних сил, то повна механічна енергія цього тіла чи системи залишається постійної. В ізольованій системі, де діють лише консервативні сили, повна механічна енергія зберігається.
Подібна інформація.



