§2.6 კინეტიკური ენერგია. კინეტიკური ენერგია ენერგიის შენარჩუნებისა და გარდაქმნის კანონი
ენერგიაარის სკალარული ფიზიკური სიდიდე, რომელიც წარმოადგენს მატერიის მოძრაობის სხვადასხვა ფორმის ერთიან საზომს და მატერიის მოძრაობის ერთი ფორმიდან მეორეზე გადასვლის საზომს.
მატერიის მოძრაობის სხვადასხვა ფორმის დასახასიათებლად შემოტანილია ენერგიის შესაბამისი ტიპები, მაგალითად: მექანიკური, შიდა, ელექტროსტატიკური, ბირთვული ურთიერთქმედების ენერგია და ა.შ.
ენერგია ემორჩილება კონსერვაციის კანონს, რომელიც ბუნების ერთ-ერთი ყველაზე მნიშვნელოვანი კანონია.
მექანიკური ენერგია E ახასიათებს სხეულების მოძრაობას და ურთიერთქმედებას და არის სხეულების სიჩქარისა და ფარდობითი პოზიციის ფუნქცია. ის უდრის კინეტიკური და პოტენციური ენერგიების ჯამს.
Კინეტიკური ენერგია
განვიხილოთ შემთხვევა, როდესაც მასის სხეული მარის მუდმივი ძალა \(~\vec F\) (ის შეიძლება იყოს რამდენიმე ძალის შედეგი) და ძალის \(~\vec F\) და გადაადგილების \(~\vec s\) ვექტორები მიმართულია ერთის გასწვრივ. სწორი ხაზი ერთი მიმართულებით. ამ შემთხვევაში ძალის მიერ შესრულებული სამუშაო შეიძლება განისაზღვროს როგორც ა = ფ∙ს. ძალის მოდული ნიუტონის მეორე კანონის მიხედვით უდრის ფ = m∙aდა გადაადგილების მოდული სერთნაირად აჩქარებულ სწორხაზოვან მოძრაობაში ასოცირდება საწყისის მოდულებთან υ 1 და ბოლო υ 2 სიჩქარე და აჩქარება აგამოხატულება \(~s = \frac(\upsilon^2_2 - \upsilon^2_1)(2a)\) .
აქედან საქმეს მივდივართ
\(~A = F \cdot s = m \cdot a \cdot \frac(\upsilon^2_2 - \upsilon^2_1)(2a) = \frac(m \cdot \upsilon^2_2)(2) - \frac (m \cdot \upsilon^2_1)(2)\) . (1)
ფიზიკური სიდიდე, რომელიც უდრის სხეულის მასის ნამრავლის ნახევარს და მისი სიჩქარის კვადრატს, ეწოდება სხეულის კინეტიკური ენერგია.
კინეტიკური ენერგია წარმოდგენილია ასოებით ეკ.
\(~E_k = \frac(m \cdot \upsilon^2)(2)\) . (2)
მაშინ ტოლობა (1) შეიძლება ჩაიწეროს შემდეგნაირად:
\(~A = E_(k2) - E_(k1)\) . (3)
კინეტიკური ენერგიის თეორემა
სხეულზე მიყენებული შედეგად მიღებული ძალების მუშაობა უდრის სხეულის კინეტიკური ენერგიის ცვლილებას.
ვინაიდან კინეტიკური ენერგიის ცვლილება უდრის ძალის მუშაობას (3), სხეულის კინეტიკური ენერგია გამოიხატება იმავე ერთეულებში, როგორც სამუშაო, ანუ ჯოულებში.
თუ მასის სხეულის მოძრაობის საწყისი სიჩქარე მარის ნული და სხეული ზრდის სიჩქარეს მნიშვნელობამდე υ , მაშინ ძალის მიერ შესრულებული სამუშაო უდრის სხეულის კინეტიკური ენერგიის საბოლოო მნიშვნელობას:
\(~A = E_(k2) - E_(k1)= \frac(m \cdot \upsilon^2)(2) - 0 = \frac(m \cdot \upsilon^2)(2)\) . (4)
კინეტიკური ენერგიის ფიზიკური მნიშვნელობა
v სიჩქარით მოძრავი სხეულის კინეტიკური ენერგია გვიჩვენებს, რამდენი სამუშაო უნდა შეასრულოს მოსვენებულ სხეულზე მოქმედმა ძალამ, რომ ეს სიჩქარე გადასცეს მას.
Პოტენციური ენერგია
Პოტენციური ენერგიაარის სხეულებს შორის ურთიერთქმედების ენერგია.
დედამიწის ზემოთ აწეული სხეულის პოტენციური ენერგია არის სხეულსა და დედამიწას შორის გრავიტაციული ძალების ურთიერთქმედების ენერგია. ელასტიურად დეფორმირებული სხეულის პოტენციური ენერგია არის სხეულის ცალკეული ნაწილების ერთმანეთთან ურთიერთქმედების ენერგია ელასტიური ძალებით.
პოტენციალიუწოდებენ ძალა, რომლის მუშაობა დამოკიდებულია მხოლოდ მოძრავი მატერიალური წერტილის ან სხეულის საწყის და საბოლოო პოზიციაზე და არ არის დამოკიდებული ტრაექტორიის ფორმაზე.
დახურულ ტრაექტორიაში პოტენციური ძალის მიერ შესრულებული სამუშაო ყოველთვის ნულის ტოლია. პოტენციურ ძალებს მიეკუთვნება გრავიტაციული ძალები, ელასტიური ძალები, ელექტროსტატიკური ძალები და სხვა.
უფლებამოსილებები, რომლის მუშაობაც დამოკიდებულია ტრაექტორიის ფორმაზე, ე.წ არაპოტენციური. როდესაც მატერიალური წერტილი ან სხეული მოძრაობს დახურულ ტრაექტორიაზე, არაპოტენციური ძალის მიერ შესრულებული სამუშაო არ არის ნულის ტოლი.
სხეულის დედამიწასთან ურთიერთქმედების პოტენციური ენერგია
მოდი ვიპოვოთ გრავიტაციით შესრულებული სამუშაო ფ t მასის სხეულის გადაადგილებისას მვერტიკალურად ქვემოთ სიმაღლიდან თ 1 დედამიწის ზედაპირიდან სიმაღლემდე თ 2 (ნახ. 1). თუ განსხვავება თ 1 – თ 2 უმნიშვნელოა დედამიწის ცენტრამდე მანძილის, შემდეგ სიმძიმის ძალასთან შედარებით ფ t სხეულის მოძრაობის დროს შეიძლება ჩაითვალოს მუდმივი და თანაბარი მგ.
ვინაიდან გადაადგილება ემთხვევა სიმძიმის ვექტორს მიმართულებით, გრავიტაციის მიერ შესრულებული სამუშაო უდრის
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (5)
ახლა განვიხილოთ სხეულის მოძრაობა დახრილი სიბრტყის გასწვრივ. სხეულის დახრილ სიბრტყეში გადაადგილებისას (ნახ. 2), მიზიდულობის ძალა ფ t = მ∙გმუშაობს
\(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
სად თ- დახრილი სიბრტყის სიმაღლე, ს- გადაადგილების მოდული დახრილი სიბრტყის სიგრძის ტოლი.
სხეულის მოძრაობა წერტილიდან INზუსტად თანნებისმიერი ტრაექტორიის გასწვრივ (ნახ. 3) შეიძლება გონებრივად წარმოვიდგინოთ, როგორც მოძრაობებისაგან დახრილი სიბრტყეების მონაკვეთების გასწვრივ სხვადასხვა სიმაღლეებით თ’, თ'' და ა.შ. სამუშაო აგრავიტაცია მთელი გზა INვ თანმარშრუტის ცალკეულ მონაკვეთებზე სამუშაოების ჯამის ტოლი:
\(~A = m \cdot g \cdot h" + m \cdot g \cdot h"" + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h" + h"" + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\), (7)
სად თ 1 და თ 2 - სიმაღლეები დედამიწის ზედაპირიდან, რომელზედაც მდებარეობს წერტილები, შესაბამისად INდა თან.

ტოლობა (7) გვიჩვენებს, რომ სიმძიმის მუშაობა არ არის დამოკიდებული სხეულის ტრაექტორიაზე და ყოველთვის ტოლია სიმძიმის მოდულის ნამრავლისა და სიმაღლეების სხვაობის საწყის და საბოლოო პოზიციებზე.
ქვევით მოძრაობისას გრავიტაციის მუშაობა დადებითია, ზევით ასვლისას უარყოფითი. დახურულ ტრაექტორიაზე გრავიტაციის მიერ შესრულებული სამუშაო ნულის ტოლია.
ტოლობა (7) შეიძლება წარმოდგენილი იყოს შემდეგნაირად:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
ფიზიკური სიდიდე, რომელიც ტოლია სხეულის მასის ნამრავლს თავისუფალი ვარდნის აჩქარების მოდულით და იმ სიმაღლეზე, რომლითაც სხეული ამაღლებულია დედამიწის ზედაპირზე, ეწოდება პოტენციური ენერგიასხეულსა და დედამიწას შორის ურთიერთქმედება.
მასის სხეულის გადაადგილებისას გრავიტაციით შესრულებული სამუშაო მსიმაღლეზე მდებარე წერტილიდან თ 2, სიმაღლეზე მდებარე წერტილამდე თ 1 დედამიწის ზედაპირიდან, ნებისმიერი ტრაექტორიის გასწვრივ, უდრის სხეულსა და დედამიწას შორის ურთიერთქმედების პოტენციური ენერგიის ცვლილებას, აღებული საპირისპირო ნიშნით.
\(~A = - (E_(p2) - E_(p1))\) . (9)
პოტენციური ენერგია მითითებულია ასოთი ეგვ.
დედამიწის ზემოთ აწეული სხეულის პოტენციური ენერგიის მნიშვნელობა დამოკიდებულია ნულოვანი დონის არჩევანზე, ანუ სიმაღლეზე, რომელზედაც პოტენციური ენერგია ითვლება ნულამდე. ჩვეულებრივ ვარაუდობენ, რომ დედამიწის ზედაპირზე სხეულის პოტენციური ენერგია ნულის ტოლია.
ნულოვანი დონის ამ არჩევანით, პოტენციური ენერგია ესიმაღლეზე მდებარე სხეულის p თდედამიწის ზედაპირის ზემოთ, უდრის სხეულის m მასის ნამრავლს თავისუფალი ვარდნის აბსოლუტური აჩქარებით გდა მანძილი თის დედამიწის ზედაპირიდან:
\(~E_p = m \cdot g \cdot h\) . (10)
სხეულის დედამიწასთან ურთიერთქმედების პოტენციური ენერგიის ფიზიკური მნიშვნელობა
სხეულის პოტენციური ენერგია, რომელზედაც მოქმედებს გრავიტაცია, ტოლია სიმძიმის მიერ შესრულებული სამუშაოს ნულოვან დონეზე გადაადგილებისას.
მთარგმნელობითი მოძრაობის კინეტიკური ენერგიისგან განსხვავებით, რომელსაც მხოლოდ დადებითი მნიშვნელობები შეიძლება ჰქონდეს, სხეულის პოტენციური ენერგია შეიძლება იყოს როგორც დადებითი, ასევე უარყოფითი. Სხეულის მასა მ, მდებარეობს სიმაღლეზე თ, სად თ < თ 0 (თ 0 – ნულოვანი სიმაღლე), აქვს უარყოფითი პოტენციური ენერგია:
\(~E_p = -m \cdot g \cdot h\) .
გრავიტაციული ურთიერთქმედების პოტენციური ენერგია
მასებთან ორი მატერიალური წერტილის სისტემის გრავიტაციული ურთიერთქმედების პოტენციური ენერგია მდა მ, მდებარეობს მანძილზე რერთი მეორისგან თანაბარია
\(~E_p = G \cdot \frac(M \cdot m)(r)\) . (თერთმეტი)
სად გარის გრავიტაციული მუდმივი და პოტენციური ენერგიის მითითების ნული ( ე p = 0) მიღებულია რ = ∞.
სხეულის გრავიტაციული ურთიერთქმედების პოტენციური ენერგია მასასთან მდედამიწასთან, სადაც თ- სხეულის სიმაღლე დედამიწის ზედაპირზე, მ e – დედამიწის მასა, რ e არის დედამიწის რადიუსი და არჩეულია პოტენციური ენერგიის ნული თ = 0.
\(~E_e = G \cdot \frac(M_e \cdot m \cdot h)(R_e \cdot (R_e +h))\) . (12)
ნულოვანი მითითების არჩევის იმავე პირობით, სხეულის გრავიტაციული ურთიერთქმედების პოტენციური ენერგია მასასთან მდედამიწასთან დაბალ სიმაღლეებზე თ (თ « რე) თანაბარი
\(~E_p = m \cdot g \cdot h\) ,
სადაც \(~g = G \cdot \frac(M_e)(R^2_e)\) არის გრავიტაციის აჩქარების მოდული დედამიწის ზედაპირთან ახლოს.
ელასტიურად დეფორმირებული სხეულის პოტენციური ენერგია
გამოვთვალოთ დრეკადობის ძალის მიერ შესრულებული სამუშაო, როდესაც ზამბარის დეფორმაცია (დრეკადობა) იცვლება გარკვეული საწყისი მნიშვნელობიდან. x 1 საბოლოო ღირებულებამდე x 2 (ნახ. 4, ბ, გ).

ელასტიური ძალა იცვლება ზამბარის დეფორმაციისას. დრეკადობის ძალის მიერ შესრულებული სამუშაოს დასადგენად, შეგიძლიათ აიღოთ ძალის მოდულის საშუალო მნიშვნელობა (რადგან დრეკადობის ძალა დამოკიდებულია ხაზობრივად x) და გავამრავლოთ გადაადგილების მოდულზე:
\(~A = F_(upr-cp) \cdot (x_1 - x_2)\) , (13)
სადაც \(~F_(upr-cp) = k \cdot \frac(x_1 - x_2)(2)\) . აქედან
\(~A = k \cdot \frac(x_1 - x_2)(2) \cdot (x_1 - x_2) = k \cdot \frac(x^2_1 - x^2_2)(2)\) ან \(~A = -\left(\frac(k \cdot x^2_2)(2) - \frac(k \cdot x^2_1)(2) \მარჯვნივ)\) . (14)
ფიზიკური სიდიდე, რომელიც უდრის სხეულის სიმყარის ნამრავლის ნახევარს მისი დეფორმაციის კვადრატით, ეწოდება პოტენციური ენერგიაელასტიურად დეფორმირებული სხეული:
\(~E_p = \frac(k \cdot x^2)(2)\) . (15)
(14) და (15) ფორმულებიდან გამომდინარეობს, რომ დრეკადობის ძალის მოქმედება უდრის დრეკად დეფორმირებული სხეულის პოტენციური ენერგიის ცვლილებას, აღებული საპირისპირო ნიშნით:
\(~A = -(E_(p2) - E_(p1))\) . (16)
თუ x 2 = 0 და x 1 = X, მაშინ, როგორც ჩანს ფორმულებიდან (14) და (15),
\(~E_p = A\) .
დეფორმირებული სხეულის პოტენციური ენერგიის ფიზიკური მნიშვნელობა
ელასტიურად დეფორმირებული სხეულის პოტენციური ენერგია უდრის დრეკადობის ძალის მიერ შესრულებულ სამუშაოს, როდესაც სხეული გადადის ისეთ მდგომარეობაში, რომელშიც დეფორმაცია ნულის ტოლია.
პოტენციური ენერგია ახასიათებს ურთიერთმოქმედ სხეულებს, ხოლო კინეტიკური ენერგია მოძრავ სხეულებს. ორივე პოტენციალი და კინეტიკური ენერგია იცვლება მხოლოდ სხეულების ისეთი ურთიერთქმედების შედეგად, რომლებშიც სხეულებზე მოქმედი ძალები მოქმედებენ ნულის გარდა. განვიხილოთ ენერგეტიკული ცვლილებების საკითხი სხეულების ურთიერთქმედების დროს, რომლებიც ქმნიან დახურულ სისტემას.
დახურული სისტემა- ეს არის სისტემა, რომელზეც არ მოქმედებს გარე ძალები ან ამ ძალების მოქმედება კომპენსირებულია. თუ რამდენიმე სხეული ურთიერთქმედებს ერთმანეთთან მხოლოდ გრავიტაციული და დრეკადი ძალებით და მათზე არ მოქმედებს გარე ძალები, მაშინ სხეულების ნებისმიერი ურთიერთქმედების შემთხვევაში დრეკადობის ან გრავიტაციული ძალების მუშაობა ტოლია სხეულების პოტენციური ენერგიის ცვლილებას, აღებული. საპირისპირო ნიშნით:
\(~A = -(E_(p2) - E_(p1))\) . (17)
კინეტიკური ენერგიის თეორემის მიხედვით, იგივე ძალების მიერ შესრულებული სამუშაო უდრის კინეტიკური ენერგიის ცვლილებას:
\(~A = E_(k2) - E_(k1)\) . (18)
ტოლობების (17) და (18) შედარებიდან ირკვევა, რომ დახურულ სისტემაში სხეულების კინეტიკური ენერგიის ცვლილება აბსოლუტური მნიშვნელობით ტოლია სხეულთა სისტემის პოტენციური ენერგიის ცვლილებას და საპირისპირო ნიშნით:
\(~E_(k2) - E_(k1) = -(E_(p2) - E_(p1))\) ან \(~E_(k1) + E_(p1) = E_(k2) + E_(p2) \) . (19)
ენერგიის შენარჩუნების კანონი მექანიკურ პროცესებში:
სხეულების კინეტიკური და პოტენციური ენერგიის ჯამი, რომლებიც ქმნიან დახურულ სისტემას და ურთიერთქმედებენ ერთმანეთთან გრავიტაციული და ელასტიური ძალებით, მუდმივი რჩება.
სხეულების კინეტიკური და პოტენციური ენერგიის ჯამი ეწოდება მთლიანი მექანიკური ენერგია.
მოდით მივცეთ მარტივი ექსპერიმენტი. მაღლა ავიყაროთ ფოლადის ბურთი. საწყისი სიჩქარის υ ინჩის მიცემით მას მივცემთ კინეტიკურ ენერგიას, რის გამოც ის დაიწყებს აწევას ზემოთ. გრავიტაციის მოქმედება იწვევს ბურთის სიჩქარის და, შესაბამისად, მისი კინეტიკური ენერგიის შემცირებას. მაგრამ ბურთი სულ უფრო და უფრო მაღლა იწევს და სულ უფრო მეტ პოტენციურ ენერგიას იძენს ( ე p = მ∙გ∙სთ). ამრიგად, კინეტიკური ენერგია არ ქრება უკვალოდ, არამედ გარდაიქმნება პოტენციურ ენერგიად.
ტრაექტორიის ზედა წერტილის მიღწევის მომენტში ( υ = 0) ბურთს მთლიანად მოკლებულია კინეტიკური ენერგია ( ე k = 0), მაგრამ ამავე დროს მისი პოტენციური ენერგია ხდება მაქსიმალური. შემდეგ ბურთი იცვლის მიმართულებას და მზარდი სიჩქარით ქვევით მოძრაობს. ახლა პოტენციური ენერგია ისევ კინეტიკურ ენერგიად გარდაიქმნება.
ენერგიის შენარჩუნების კანონი ცხადყოფს ფიზიკური მნიშვნელობაცნებები მუშაობა:
გრავიტაციული და ელასტიური ძალების მუშაობა, ერთი მხრივ, უდრის კინეტიკური ენერგიის ზრდას, ხოლო მეორე მხრივ, სხეულების პოტენციური ენერგიის შემცირებას. მაშასადამე, სამუშაო უდრის ერთი სახეობიდან მეორეზე გადაყვანილ ენერგიას.
მექანიკური ენერგიის ცვლილების კანონი
თუ ურთიერთმოქმედი სხეულების სისტემა არ არის დახურული, მაშინ მისი მექანიკური ენერგია არ არის დაცული. ასეთი სისტემის მექანიკური ენერგიის ცვლილება უდრის გარე ძალების მუშაობას:
\(~A_(vn) = \დელტა E = E - E_0\) . (20)
სად ედა ე 0 – სისტემის ჯამური მექანიკური ენერგიები საბოლოო და საწყის მდგომარეობაში, შესაბამისად.
ასეთი სისტემის მაგალითია სისტემა, რომელშიც პოტენციურ ძალებთან ერთად მოქმედებს არაპოტენციური ძალები. არაპოტენციური ძალები მოიცავს ხახუნის ძალებს. უმეტეს შემთხვევაში, როდესაც კუთხე ხახუნის ძალას შორის ფ რსხეული არის π რადიანები, ხახუნის ძალის მიერ შესრულებული სამუშაო უარყოფითია და ტოლია
\(~A_(tr) = -F_(tr) \cdot s_(12)\) ,
სად ს 12 - სხეულის გზა 1 და 2 წერტილებს შორის.
სისტემის მოძრაობის დროს ხახუნის ძალები ამცირებს მის კინეტიკურ ენერგიას. ამის შედეგად, დახურული არაკონსერვატიული სისტემის მექანიკური ენერგია ყოველთვის მცირდება, გადაიქცევა მოძრაობის არამექანიკური ფორმების ენერგიად.
მაგალითად, გზის ჰორიზონტალურ მონაკვეთზე მოძრავი მანქანა, ძრავის გამორთვის შემდეგ, გადის გარკვეულ მანძილზე და ჩერდება ხახუნის ძალების გავლენით. მანქანის წინ მოძრაობის კინეტიკური ენერგია ნულის ტოლი გახდა და პოტენციური ენერგია არ გაიზარდა. როდესაც მანქანა დამუხრუჭდა, სამუხრუჭე ხუნდები, მანქანის საბურავები და ასფალტი თბებოდა. შესაბამისად, ხახუნის ძალების მოქმედების შედეგად, მანქანის კინეტიკური ენერგია არ გაქრა, არამედ გადაიქცა მოლეკულების თერმული მოძრაობის შინაგან ენერგიად.
ენერგიის შენარჩუნებისა და ტრანსფორმაციის კანონი
ნებისმიერი ფიზიკური ურთიერთქმედებისას ენერგია ერთი ფორმიდან მეორეში გარდაიქმნება.
ზოგჯერ კუთხე ხახუნის ძალას შორის ფ tr და ელემენტარული გადაადგილება Δ რნულის ტოლია და ხახუნის ძალის მუშაობა დადებითია:
\(~A_(tr) = F_(tr) \cdot s_(12)\) ,
მაგალითი 1. მიეცით გარე ძალა ფმოქმედებს ბლოკზე IN, რომელსაც შეუძლია კალათაზე სრიალი დ(ნახ. 5). თუ ურიკა მოძრაობს მარჯვნივ, მაშინ სამუშაო შესრულებულია მოცურების ხახუნის ძალით ფ tr2, რომელიც მოქმედებს ეტლზე ბლოკის მხრიდან, დადებითია:

მაგალითი 2. როდესაც ბორბალი ტრიალებს, მისი მოძრავი ხახუნის ძალა მიმართულია მოძრაობის გასწვრივ, რადგან ბორბლის შეხების წერტილი ჰორიზონტალურ ზედაპირთან მოძრაობს ბორბლის მოძრაობის მიმართულების საწინააღმდეგო მიმართულებით, ხოლო ხახუნის ძალის მოქმედება დადებითია. (ნახ. 6):

ლიტერატურა
- ყაბარდოელი ო.ფ. ფიზიკა: მითითება. მასალა: სახელმძღვანელო. სახელმძღვანელო სტუდენტებისთვის. – მ.: განათლება, 1991. – 367გვ.
- Kikoin I.K., Kikoin A.K. ფიზიკა: სახელმძღვანელო. მე-9 კლასისთვის. საშ. სკოლა – მ.: პროსვეშჩენიე, 1992. – 191გვ.
- დაწყებითი ფიზიკის სახელმძღვანელო: პროკ. შემწეობა. 3 ტომად / რედ. გ.ს. ლანდსბერგი: ტ.1. მექანიკა. სითბო. მოლეკულური ფიზიკა. – მ.: Fizmatlit, 2004. – 608გვ.
- იავორსკი ბ.მ., სელეზნევი იუ.ა. ფიზიკის საცნობარო გზამკვლევი მათთვის, ვინც სწავლობს უნივერსიტეტებსა და თვითგანათლებას. – მ.: ნაუკა, 1983. – 383გვ.
სამუშაოს კონცეფციასთან მჭიდრო კავშირშია კიდევ ერთი ფუნდამენტური ფიზიკური კონცეფცია - ენერგიის ცნება. ვინაიდან მექანიკა სწავლობს, პირველ რიგში, სხეულების მოძრაობას და მეორეც, სხეულების ურთიერთქმედებას ერთმანეთთან, ჩვეულებრივ უნდა განვასხვავოთ მექანიკური ენერგიის ორი ტიპი: კინეტიკური ენერგია, გამოწვეული სხეულის მოძრაობით და პოტენციური ენერგია, გამოწვეული სხეულის სხვა სხეულებთან ურთიერთქმედებით.
Კინეტიკური ენერგია მექანიკური სისტემა ენერგიას უწოდებენდამოკიდებულია ამ სისტემის წერტილების გადაადგილების სიჩქარეზე.
კინეტიკური ენერგიის გამოხატულება შეიძლება მოიძებნოს მატერიალურ წერტილზე გამოყენებული შედეგის ძალის მუშაობის განსაზღვრით. (2.24) საფუძველზე ჩვენ ვწერთ შედეგიანი ძალის ელემენტარული მუშაობის ფორმულას:
იმიტომ რომ  , მაშინ dA = mυdυ. (2.25)
, მაშინ dA = mυdυ. (2.25)
შედეგიანი ძალის მიერ შესრულებული სამუშაოს საპოვნელად, როდესაც სხეულის სიჩქარე იცვლება υ 1-დან υ 2-მდე, ჩვენ ვაერთიანებთ გამოხატულებას (2.29):
 (2.26)
(2.26)
ვინაიდან მუშაობა არის ენერგიის გადაცემის საზომი ერთი სხეულიდან მეორეზე, მაშინ
(2.30) საფუძველზე ვწერთ, რომ რაოდენობა  არის კინეტიკური ენერგია
არის კინეტიკური ენერგია
სხეული:  საიდანაც (1.44)-ის ნაცვლად ვიღებთ
საიდანაც (1.44)-ის ნაცვლად ვიღებთ
 (2.27)
(2.27)
ფორმულით (2.30) გამოხატულ თეორემას ჩვეულებრივ უწოდებენ კინეტიკური ენერგიის თეორემა . მისი შესაბამისად, სხეულზე (ან სხეულთა სისტემაზე) მოქმედი ძალების მოქმედება უდრის ამ სხეულის (ან სხეულთა სისტემის) კინეტიკური ენერგიის ცვლილებას.
კინეტიკური ენერგიის თეორემიდან გამომდინარეობს კინეტიკური ენერგიის ფიზიკური მნიშვნელობა : სხეულის კინეტიკური ენერგია ტოლია იმ სამუშაოს, რომელიც მას შეუძლია შეასრულოს სიჩქარის ნულამდე შემცირების პროცესში.რაც უფრო დიდია კინეტიკური ენერგიის „რეზერვი“ სხეულში, მით მეტი სამუშაოს შესრულება შეუძლია მას.
სისტემის კინეტიკური ენერგია უდრის იმ მატერიალური წერტილების კინეტიკური ენერგიების ჯამს, საიდანაც ეს სისტემა შედგება:
 (2.28)
(2.28)
თუ სხეულზე მოქმედი ყველა ძალის მუშაობა დადებითია, მაშინ სხეულის კინეტიკური ენერგია იზრდება, თუ მუშაობა უარყოფითია, მაშინ კინეტიკური ენერგია მცირდება.
აშკარაა, რომ სხეულზე გამოყენებული ყველა ძალის შედეგის ელემენტარული მუშაობა ტოლი იქნება სხეულის კინეტიკური ენერგიის ელემენტარულ ცვლილებას:
dA = dE k. (2.29)
დასასრულს, ჩვენ აღვნიშნავთ, რომ კინეტიკური ენერგია, ისევე როგორც მოძრაობის სიჩქარე, ფარდობითია. მაგალითად, მატარებელში მჯდომი მგზავრის კინეტიკური ენერგია განსხვავებული იქნება, თუ განვიხილავთ მოძრაობას გზის ზედაპირზე ან ვაგონთან შედარებით.
§2.7 პოტენციური ენერგია
მექანიკური ენერგიის მეორე ტიპია პოტენციური ენერგია - ენერგია სხეულების ურთიერთქმედების გამო.
პოტენციური ენერგია არ ახასიათებს სხეულების რაიმე ურთიერთქმედებას, არამედ მხოლოდ იმას, რაც აღწერილია ძალებით, რომლებიც არ არის დამოკიდებული სიჩქარეზე. ძალების უმეტესობა (სიმძიმე, ელასტიურობა, გრავიტაციული ძალები და ა.შ.) სწორედ ეს არის; ერთადერთი გამონაკლისი არის ხახუნის ძალები. განსახილველი ძალების მუშაობა არ არის დამოკიდებული ტრაექტორიის ფორმაზე, არამედ განისაზღვრება მხოლოდ მისი საწყისი და საბოლოო პოზიციებით. დახურულ ტრაექტორიაზე ასეთი ძალების მიერ შესრულებული სამუშაო ნულის ტოლია.
ძალებს, რომელთა მუშაობა არ არის დამოკიდებული ტრაექტორიის ფორმაზე, არამედ დამოკიდებულია მხოლოდ მატერიალური წერტილის (სხეულის) საწყის და საბოლოო პოზიციაზე, ე.წ. პოტენციური ან კონსერვატიული ძალები .
თუ სხეული ურთიერთქმედებს გარემოსთან პოტენციური ძალების მეშვეობით, მაშინ შეიძლება შემოვიდეს პოტენციური ენერგიის კონცეფცია ამ ურთიერთქმედების დასახასიათებლად.
პოტენციალი არის ენერგია, რომელიც გამოწვეულია სხეულების ურთიერთქმედებით და მათი შედარებითი პოზიციიდან გამომდინარე.
მოდი ვიპოვოთ მიწის ზემოთ აწეული სხეულის პოტენციური ენერგია. მოდით, m მასის სხეული ერთნაირად მოძრაობდეს გრავიტაციულ ველში 1-დან მე-2 პოზიციამდე ზედაპირის გასწვრივ, რომლის კვეთა ნახაზის სიბრტყით ნაჩვენებია ნახ. 2.8. ეს მონაკვეთი არის მატერიალური წერტილის (სხეულის) ტრაექტორია. თუ ხახუნი არ არის, მაშინ წერტილზე მოქმედებს სამი ძალა:
1) ზედაპირიდან N ძალა ზედაპირის მიმართ ნორმალურია, ამ ძალის მუშაობა ნულის ტოლია;
2) გრავიტაციული მგ, ამ ძალის მუშაობა A 12;
3) წევის ძალა F ზოგიერთი მამოძრავებელი სხეულისგან (შიგაწვის ძრავა, ელექტროძრავა, ადამიანი და ა.შ.); ამ ძალის მუშაობა ავღნიშნოთ A T-ით.
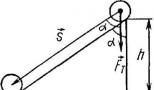
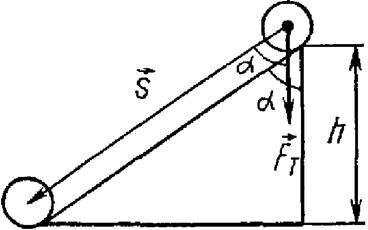
განვიხილოთ გრავიტაციის მოქმედება ℓ სიგრძის დახრილ სიბრტყეში სხეულის გადაადგილებისას (ნახ. 2.9). როგორც ამ ფიგურიდან ჩანს, სამუშაო ტოლია
A" = მგℓ cosα = მგℓ cos(90° + α) = - მგℓ sinα
ВСD სამკუთხედიდან გვაქვს ℓ sinα = h, ასე რომ, ბოლო ფორმულიდან გამომდინარეობს:
სხეულის ტრაექტორია (იხ. ნახ. 2.8) სქემატურად შეიძლება წარმოდგენილი იყოს დახრილი სიბრტყის მცირე მონაკვეთებით, ამიტომ, სიმძიმის მუშაობისთვის მთელ ტრაექტორიაზე 1 -2, მოქმედებს შემდეგი გამოთქმა:
A 12 =მგ (სთ 1 -სთ 2) =-(მგ სთ 2 - მგ სთ 1) (2.30)
Ისე, სიმძიმის მუშაობა არ არის დამოკიდებული სხეულის ტრაექტორიაზე, არამედ დამოკიდებულია ტრაექტორიის საწყისი და დასასრული წერტილების სიმაღლეების განსხვავებაზე.
ზომა
e n = მგ სთ (2.31)
დაურეკა პოტენციური ენერგია m მასის მატერიალური წერტილი (სხეული), რომელიც აღმართულია მიწის ზემოთ h სიმაღლეზე. ამრიგად, ფორმულა (2.30) შეიძლება გადაიწეროს შემდეგნაირად:
A 12 = =-(En 2 - En 1) ან A 12 = =-ΔEn (2.32)
გრავიტაციის მოქმედება უდრის საპირისპირო ნიშნით აღებული სხეულების პოტენციური ენერგიის ცვლილებას, ანუ განსხვავებას მის საბოლოო და საწყისს შორის.ღირებულებები (პოტენციური ენერგიის თეორემა ).
მსგავსი მსჯელობა შეიძლება მოჰყვეს ელასტიურად დეფორმირებულ სხეულს.
 (2.33)
(2.33)
გაითვალისწინეთ, რომ პოტენციურ ენერგიებში განსხვავებას აქვს ფიზიკური მნიშვნელობა, როგორც რაოდენობა, რომელიც განსაზღვრავს კონსერვატიული ძალების მუშაობას. ამ მხრივ, არ აქვს მნიშვნელობა რომელ პოზიციას, კონფიგურაციას, ნულოვანი პოტენციური ენერგია უნდა მიეწეროს.
ერთი ძალიან მნიშვნელოვანი დასკვნა შეიძლება მივიღოთ პოტენციური ენერგიის თეორემიდან: კონსერვატიული ძალები ყოველთვის მიმართულია პოტენციური ენერგიის შემცირებისკენ.დადგენილი ნიმუში გამოიხატება იმაში, რომ საკუთარ თავზე დარჩენილი ნებისმიერი სისტემა ყოველთვის მიდრეკილია გადავიდეს ისეთ მდგომარეობაში, რომელშიც მის პოტენციურ ენერგიას ყველაზე ნაკლები მნიშვნელობა აქვს.Ეს არის მინიმალური პოტენციური ენერგიის პრინციპი .
თუ მოცემულ მდგომარეობაში არსებულ სისტემას არ აქვს მინიმალური პოტენციური ენერგია, მაშინ ეს მდგომარეობა ეწოდება ენერგიულად არახელსაყრელი.
თუ ბურთი ჩაზნექილი თასის ძირშია (ნახ. 2.10, ა), სადაც მისი პოტენციური ენერგია მინიმალურია (მეზობელ პოზიციებზე მის მნიშვნელობებთან შედარებით), მაშინ მისი მდგომარეობა უფრო ხელსაყრელია. ბურთის წონასწორობა ამ შემთხვევაში არის მდგრადი: თუ ბურთი გვერდზე გადაიტანეთ და გაათავისუფლებთ, ის დაუბრუნდება თავდაპირველ პოზიციას.
მაგალითად, ბურთის პოზიცია ამოზნექილი ზედაპირის თავზე ენერგიულად არახელსაყრელია (ნახ. 2.10, ბ). ბურთზე მოქმედი ძალების ჯამი არის ნული და, შესაბამისად, ეს ბურთი წონასწორობაში იქნება. თუმცა, ეს ბალანსი არის არასტაბილური: ოდნავი ზემოქმედება საკმარისია იმისთვის, რომ ჩამოაგდეს და ამით გადავიდეს ენერგიულად უფრო ხელსაყრელ მდგომარეობაში, ე.ი. ნაკლების მქონე
პ  პოტენციური ენერგია.
პოტენციური ენერგია.
ზე გულგრილიწონასწორობაში (ნახ. 2.10, გ) სხეულის პოტენციური ენერგია უდრის მისი ყველა შესაძლო უახლოესი მდგომარეობის პოტენციურ ენერგიას.
2.11 სურათზე შეგიძლიათ მიუთითოთ სივრცის შეზღუდული რეგიონი (მაგალითად, cd), რომელშიც პოტენციური ენერგია ნაკლებია, ვიდრე მის გარეთ. ამ ტერიტორიას ეწოდა პოტენციური კარგად .
თუ ელემენტარული გადაადგილება d იწერება სახით:
ნიუტონის II კანონის მიხედვით:
რაოდენობას კინეტიკური ენერგია ეწოდება
ნაწილაკზე მოქმედი ყველა ძალის შედეგის მუშაობა უდრის ნაწილაკების კინეტიკური ენერგიის ცვლილებას.
ან სხვა ჩანაწერი
კინეტიკური დისპაციური სკალარული ფიზიკური
თუ A > 0, მაშინ WC იზრდება (ეცემა)
თუ A > 0, მაშინ WC მცირდება (სროლა).
მოძრავ სხეულებს აქვთ მუშაობის უნარი იმ შემთხვევაშიც კი, თუ მათზე არ მოქმედებს სხვა სხეულების ძალები. თუ სხეული მუდმივი სიჩქარით მოძრაობს, მაშინ სხეულზე მოქმედი ყველა ძალის ჯამი 0-ის ტოლია და არანაირი სამუშაო არ არის შესრულებული. თუ სხეული მოქმედებს გარკვეული ძალით სხვა სხეულზე მოძრაობის მიმართულებით, მაშინ მას შეუძლია სამუშაოს შესრულება. ნიუტონის მესამე კანონის თანახმად, იგივე სიდიდის ძალა მიემართება მოძრავ სხეულს, მაგრამ მიმართული საპირისპირო მიმართულებით. ამ ძალის მოქმედების წყალობით, სხეულის სიჩქარე შემცირდება მანამ, სანამ ის მთლიანად არ გაჩერდება. სხეულის მოძრაობით გამოწვეულ ენერგიას WC ეწოდება კინეტიკური. მთლიანად გაჩერებული სხეული სამუშაოს ვერ ასრულებს. WC დამოკიდებულია სიჩქარეზე და სხეულის წონაზე. სიჩქარის მიმართულების შეცვლა არ მოქმედებს კინეტიკურ ენერგიაზე.
ენერგია არის სკალარული რაოდენობა. SI ენერგიის ერთეული არის ჯოული.
კინეტიკური და პოტენციური ენერგია
არსებობს ორი სახის ენერგია - კინეტიკური და პოტენციური.
განმარტება
Კინეტიკური ენერგია- ეს არის ენერგია, რომელსაც სხეული ფლობს მისი მოძრაობის გამო:
განმარტება
Პოტენციური ენერგიაარის ენერგია, რომელიც განისაზღვრება სხეულების ფარდობითი პოზიციით, ასევე ამ სხეულებს შორის ურთიერთქმედების ძალების ბუნებით.
დედამიწის გრავიტაციულ ველში პოტენციური ენერგია არის ენერგია, რომელიც გამოწვეულია სხეულის გრავიტაციული ურთიერთქმედებით დედამიწასთან. იგი განისაზღვრება სხეულის პოზიციით დედამიწასთან მიმართებაში და უდრის სხეულის მოცემული პოზიციიდან ნულოვან დონეზე გადატანის სამუშაოს:
პოტენციური ენერგია არის ენერგია, რომელიც გამოწვეულია სხეულის ნაწილების ერთმანეთთან ურთიერთქმედებით. იგი უდრის გარე ძალების მუშაობას არადეფორმირებული ზამბარის დაჭიმვისას (შეკუმშვისას) ოდენობით:
სხეულს შეუძლია ერთდროულად ფლობდეს როგორც კინეტიკური, ასევე პოტენციური ენერგია.
სხეულის ან სხეულთა სისტემის მთლიანი მექანიკური ენერგია უდრის სხეულის კინეტიკური და პოტენციური ენერგიის ჯამს (სხეულების სისტემა):
ენერგიის შენარჩუნების კანონი
სხეულთა დახურული სისტემისთვის მოქმედებს ენერგიის შენარჩუნების კანონი:
იმ შემთხვევაში, როდესაც სხეულზე (ან სხეულთა სისტემაზე) მოქმედებს გარე ძალები, მაგალითად, მექანიკური ენერგიის შენარჩუნების კანონი არ არის დაცული. ამ შემთხვევაში სხეულის (სხეულების სისტემის) მთლიანი მექანიკური ენერგიის ცვლილება უდრის გარე ძალებს:
ენერგიის შენარჩუნების კანონი საშუალებას გვაძლევს დავამყაროთ რაოდენობრივი კავშირი მატერიის მოძრაობის სხვადასხვა ფორმას შორის. ისევე, როგორც , ის მოქმედებს არა მხოლოდ, არამედ ყველა ბუნებრივი მოვლენისთვის. ენერგიის შენარჩუნების კანონი ამბობს, რომ ბუნებაში ენერგია არ შეიძლება განადგურდეს ისევე, როგორც არ შეიძლება შეიქმნას არაფრისგან.
მისი ყველაზე ზოგადი ფორმით, ენერგიის შენარჩუნების კანონი შეიძლება ჩამოყალიბდეს შემდეგნაირად:
- ბუნებაში ენერგია არ ქრება და ხელახლა არ იქმნება, არამედ მხოლოდ ერთი სახეობიდან მეორეში გარდაიქმნება.
პრობლემის გადაჭრის მაგალითები
მაგალითი 1
| ვარჯიში | 400 მ/წმ სიჩქარით მფრინავი ტყვია ხვდება თიხის ლილვს და გადის გაჩერებამდე 0,5 მ.განისაზღვრე ლილვის წინააღმდეგობა ტყვიის მოძრაობის მიმართ, თუ მისი მასა არის 24 გ. |
| გამოსავალი | ლილვის წინააღმდეგობის ძალა არის გარე ძალა, ამიტომ ამ ძალის მიერ შესრულებული სამუშაო ტოლია ტყვიის კინეტიკური ენერგიის ცვლილებას: ვინაიდან ლილვის წინააღმდეგობის ძალა ეწინააღმდეგება ტყვიის მოძრაობის მიმართულებას, ამ ძალის მიერ შესრულებული სამუშაო არის: ტყვიის კინეტიკური ენერგიის ცვლილება: ამრიგად, ჩვენ შეგვიძლია დავწეროთ: საიდან მოდის თიხის გალავნის წინააღმდეგობის ძალა: გადავიყვანოთ ერთეულები SI სისტემაში: გ კგ. მოდით გამოვთვალოთ წინააღმდეგობის ძალა: |
| უპასუხე | ლილვის წინააღმდეგობის ძალა არის 3.8 კნ. |
მაგალითი 2
| ვარჯიში | ტვირთი, რომლის წონაა 0,5 კგ, ეცემა გარკვეული სიმაღლიდან 1 კგ მასის თეფშზე, რომელიც დამონტაჟებულია 980 ნ/მ სიხისტის კოეფიციენტის მქონე ზამბარაზე. დაადგინეთ ზამბარის უდიდესი შეკუმშვის სიდიდე, თუ დარტყმის მომენტში დატვირთვას ჰქონდა 5 მ/წმ სიჩქარე. ზემოქმედება არაელასტიურია. |
| გამოსავალი | მოდით დავწეროთ დატვირთვა + ფირფიტა დახურული სისტემისთვის. ვინაიდან ზემოქმედება არაელასტიურია, გვაქვს: საიდან მოდის ფირფიტის სიჩქარე დარტყმის შემდეგ დატვირთვით:
ენერგიის კონსერვაციის კანონის მიხედვით, დატვირთვის მთლიანი მექანიკური ენერგია დარტყმის შემდეგ ფირფიტასთან ერთად უდრის შეკუმშული ზამბარის პოტენციურ ენერგიას: |

ნიუტონის პირველი კანონი ამტკიცებს ისეთი ფენომენის არსებობას, როგორიცაა სხეულების ინერცია. ამიტომ იგი ასევე ცნობილია როგორც ინერციის კანონი. ინერცია არის სხეულის ფენომენი, რომელიც ინარჩუნებს მოძრაობის სიჩქარეს (როგორც სიდიდით, ასევე მიმართულებით), როდესაც სხეულზე ძალები არ მოქმედებს. მოძრაობის სიჩქარის შესაცვლელად სხეულზე გარკვეული ძალა უნდა იქნას გამოყენებული. ბუნებრივია, სხვადასხვა სხეულებზე თანაბარი სიდიდის ძალების მოქმედების შედეგი განსხვავებული იქნება. ამრიგად, ამბობენ, რომ სხეულებს აქვთ ინერცია. ინერცია არის სხეულების თვისება, წინააღმდეგობა გაუწიონ ცვლილებებს მათ ამჟამინდელ მდგომარეობაში. ინერციის რაოდენობა ხასიათდება სხეულის მასით. არსებობს ისეთი საცნობარო სისტემები, რომლებსაც ინერციული ეწოდება, რომელთა მიმართ მატერიალური წერტილი, გარეგანი გავლენის არარსებობის შემთხვევაში, განუსაზღვრელი ვადით ინარჩუნებს სიჩქარის სიდიდეს და მიმართულებას.
ნიუტონის მეორე კანონი არის მოძრაობის დიფერენციალური კანონი, რომელიც აღწერს ურთიერთობას მატერიალურ წერტილზე მიყენებულ ძალასა და ამ წერტილის აჩქარებას შორის. სინამდვილეში, ნიუტონის მეორე კანონი შემოაქვს მასას, როგორც მატერიალური წერტილის ინერციის გამოვლენის საზომს შერჩეულ ინერციულ საცნობარო ჩარჩოში (IFR). ინერციულ საცნობარო სისტემაში, აჩქარება, რომელსაც იღებს მატერიალური წერტილი, პირდაპირპროპორციულია მასზე გამოყენებული ყველა ძალის შედეგისა და უკუპროპორციულია მის მასაზე.
მესამეების კანონი ეს კანონი ხსნის რა ემართება ორ ურთიერთმოქმედ სხეულს. მაგალითად ავიღოთ დახურული სისტემა, რომელიც შედგება ორი სხეულისგან. პირველ სხეულს შეუძლია იმოქმედოს მეორეზე გარკვეული ძალით, ხოლო მეორეს შეუძლია იმოქმედოს პირველზე ძალით. როგორ ადარებენ ძალებს? ნიუტონის მესამე კანონი ამბობს: მოქმედების ძალა სიდიდით ტოლია და რეაქციის ძალის მიმართულებით საპირისპიროა. ხაზგასმით აღვნიშნოთ, რომ ეს ძალები ვრცელდება სხვადასხვა ორგანოზე და, შესაბამისად, საერთოდ არ არის კომპენსირებული. მოქმედებას ყოველთვის აქვს თანაბარი და საპირისპირო რეაქცია, თორემ ორი სხეულის ურთიერთქმედება ერთმანეთზე თანაბარია და მიმართულია საპირისპირო მიმართულებით.
4 ) ფარდობითობის პრინციპი- ფუნდამენტური ფიზიკური პრინციპი, რომლის მიხედვითაც ინერციულ საცნობარო სისტემებში ყველა ფიზიკური პროცესი ერთნაირად მიმდინარეობს, იმისდა მიუხედავად, სისტემა სტაციონარულია თუ ერთგვაროვანი და სწორხაზოვანი მოძრაობის მდგომარეობაში.
აქედან გამომდინარეობს, რომ ბუნების ყველა კანონი ერთნაირია ყველა ინერციულ მიმართვის სისტემაში.
არსებობს განსხვავება აინშტაინის ფარდობითობის პრინციპს (რომელიც ზემოთ მოცემულია) და გალილეოს ფარდობითობის პრინციპს შორის, რომელიც ერთსა და იმავეს აცხადებს, მაგრამ არა ბუნების ყველა კანონისთვის, არამედ მხოლოდ კლასიკური მექანიკის კანონებისთვის, რაც გულისხმობს გალილეოს გარდაქმნების გამოყენებას. , რომელიც ღიად ტოვებს ფარდობითობის პრინციპის ოპტიკასა და ელექტროდინამიკის გამოყენებადობის საკითხს .
თანამედროვე ლიტერატურაში ფარდობითობის პრინციპი მისი გამოყენებისას ინერციულ საცნობარო სისტემაზე (ყველაზე ხშირად გრავიტაციის არარსებობის ან მისი უგულებელყოფის შემთხვევაში) ჩვეულებრივ ტერმინოლოგიურად ჩნდება როგორც ლორენცის კოვარიანტობა (ან ლორენცის ინვარიანტობა).
5)ძალები ბუნებაში.
ძალების მრავალფეროვნების მიუხედავად, არსებობს მხოლოდ ოთხი სახის ურთიერთქმედება: გრავიტაციული, ელექტრომაგნიტური, ძლიერი და სუსტი.
გრავიტაციული ძალები შესამჩნევად ვლინდება კოსმოსური მასშტაბით. გრავიტაციული ძალების ერთ-ერთი გამოვლინებაა სხეულების თავისუფალი დაცემა. დედამიწა ყველა სხეულს ანიჭებს ერთსა და იმავე აჩქარებას, რასაც გრავიტაციის აჩქარება გ. იგი ოდნავ განსხვავდება გეოგრაფიული განედიდან გამომდინარე. მოსკოვის განედზე არის 9,8 მ/წ2.
ელექტრომაგნიტური ძალები მოქმედებს ნაწილაკებს შორის, რომლებსაც აქვთ ელექტრული მუხტი. ძლიერი და სუსტი ურთიერთქმედება ვლინდება ატომის ბირთვებში და ბირთვულ გარდაქმნებში.
გრავიტაციული ურთიერთქმედება არსებობს მასის მქონე ყველა სხეულს შორის. ნიუტონის მიერ აღმოჩენილი უნივერსალური მიზიდულობის კანონი ამბობს:
ორ სხეულს შორის ურთიერთმიზიდულობის ძალა, რომელიც შეიძლება მივიღოთ მატერიალურ წერტილებად, პირდაპირპროპორციულია მათი მასების ნამრავლისა და უკუპროპორციულია მათ შორის მანძილის კვადრატისა:
პროპორციულობის კოეფიციენტს y ეწოდება გრავიტაციული მუდმივი. უდრის 6,67 10-11 ნმ2/კგ2.
თუ მხოლოდ დედამიწის მიზიდულობის ძალა მოქმედებს სხეულზე, მაშინ ის უდრის მგ. ეს არის გრავიტაციის ძალა G (დედამიწის ბრუნვის გათვალისწინების გარეშე). მიზიდულობის ძალა მოქმედებს დედამიწის ყველა სხეულზე, განურჩევლად მათი მოძრაობისა.
როდესაც სხეული მოძრაობს გრავიტაციის აჩქარებით (ან თუნდაც ქვევით მიმართული უფრო დაბალი აჩქარებით), შეინიშნება სრული ან ნაწილობრივი უწონობის ფენომენი.
სრული უწონაობა - არანაირი ზეწოლა სადგამზე ან გიმბალზე. წონა არის სხეულის წნევის ძალა ჰორიზონტალურ საყრდენზე ან ძაფის დაჭიმვის ძალა მისგან შეკიდული სხეულიდან, რომელიც წარმოიქმნება დედამიწისკენ ამ სხეულის გრავიტაციულ მიზიდულობასთან დაკავშირებით.
სხეულებს შორის მიზიდულობის ძალები ურღვევია, ხოლო სხეულის წონა შეიძლება გაქრეს. ამრიგად, თანამგზავრში, რომელიც მოძრაობს გაქცევის სიჩქარით დედამიწის ირგვლივ, არ არის წონა, ისევე როგორც ლიფტი, რომელიც ეცემა გ აჩქარებით.
ელექტრომაგნიტური ძალების მაგალითებია ხახუნის და ელასტიურობის ძალები. არსებობს მოცურების ხახუნის ძალები და მოძრავი ხახუნის ძალები. მოცურების ხახუნის ძალა გაცილებით მეტია, ვიდრე მოძრავი ხახუნის ძალა.
ხახუნის ძალა გარკვეულ ინტერვალში დამოკიდებულია გამოყენებული ძალაზე, რომელიც მიდრეკილია ერთი სხეულის გადაადგილებისკენ მეორეზე. სხვადასხვა სიდიდის ძალის გამოყენებით დავინახავთ, რომ მცირე ძალებს არ შეუძლიათ სხეულის გადაადგილება. ამ შემთხვევაში წარმოიქმნება სტატიკური ხახუნის კომპენსირებადი ძალა.
სხეულის გადაადგილების ძალების არარსებობის შემთხვევაში, სტატიკური ხახუნის ძალა ნულის ტოლია. სტატიკური ხახუნის ძალა თავის უდიდეს მნიშვნელობას იძენს იმ მომენტში, როდესაც ერთი სხეული იწყებს მოძრაობას მეორესთან შედარებით. ამ შემთხვევაში, სტატიკური ხახუნის ძალა ტოლი ხდება მოცურების ხახუნის ძალის:
![]()
სადაც n არის ხახუნის კოეფიციენტი, N არის ნორმალური (პერპენდიკულარული) წნევის ძალა. ხახუნის კოეფიციენტი დამოკიდებულია ხახუნის ზედაპირების ნივთიერებაზე და მათ უხეშობაზე.
6) იმპულსის შენარჩუნების კანონი (იმპულსის შენარჩუნების კანონი) ამბობს, რომ დახურული სისტემის ყველა სხეულის (ან ნაწილაკების) იმპულსების ვექტორული ჯამი მუდმივი სიდიდეა.
კლასიკურ მექანიკაში, იმპულსის შენარჩუნების კანონი, როგორც წესი, მიღებულია ნიუტონის კანონების შედეგად. ნიუტონის კანონებიდან ჩანს, რომ ცარიელ სივრცეში გადაადგილებისას იმპულსი დროში შენარჩუნებულია, ხოლო ურთიერთქმედების არსებობისას მისი ცვლილების სიჩქარე განისაზღვრება გამოყენებული ძალების ჯამით.
ნებისმიერი ფუნდამენტური კონსერვაციის კანონის მსგავსად, იმპულსის შენარჩუნების კანონი აღწერს ერთ-ერთ ფუნდამენტურ სიმეტრიას - სივრცის ერთგვაროვნებას.
მასის ცენტრი მექანიკაში- ეს არის გეომეტრიული წერტილი, რომელიც ახასიათებს სხეულის მოძრაობას ან მთლიანად ნაწილაკების სისტემას. მასის ცენტრის ცნება ფართოდ გამოიყენება ფიზიკაში.
ხისტი სხეულის მოძრაობა შეიძლება ჩაითვალოს, როგორც მასის ცენტრის მოძრაობის სუპერპოზიცია და სხეულის ბრუნვის მოძრაობა მისი მასის ცენტრის გარშემო. ამ შემთხვევაში მასის ცენტრი ისევე მოძრაობს, როგორც იგივე მასის მქონე სხეული, მაგრამ უსასრულოდ მცირე ზომები (მატერიალური წერტილი) გადაადგილდება. ეს უკანასკნელი, კერძოდ, ნიშნავს, რომ ნიუტონის ყველა კანონი გამოიყენება ამ მოძრაობის აღსაწერად. ხშირ შემთხვევაში, თქვენ შეგიძლიათ მთლიანად უგულებელყოთ სხეულის ზომა და ფორმა და გაითვალისწინოთ მხოლოდ მისი მასის ცენტრის მოძრაობა. ხშირად მოსახერხებელია დახურული სისტემის მოძრაობის განხილვა მასის ცენტრთან ასოცირებულ საცნობარო სისტემაში. ასეთ საცნობარო სისტემას უწოდებენ მასის სისტემის ცენტრს (C-სისტემა), ან ინერციის სისტემის ცენტრს. მასში დახურული სისტემის მთლიანი იმპულსი ყოველთვის რჩება ნულის ტოლი, რაც შესაძლებელს ხდის მისი მოძრაობის განტოლებების გამარტივებას.
ენერგია- სკალარული ფიზიკური სიდიდე, რომელიც არის მატერიის მოძრაობის სხვადასხვა ფორმის ერთიანი საზომი და მატერიის მოძრაობის ერთი ფორმიდან მეორეზე გადასვლის საზომი. მექანიკური მუშაობაარის ფიზიკური სიდიდე, რომელიც არის სხეულზე ან სისტემაზე ძალის ან ძალების მოქმედების სკალარული რაოდენობრივი საზომი, რაც დამოკიდებულია ძალის (ძალების) რიცხვითი სიდიდისა და მიმართულების და სხეულის წერტილის (წერტილების) მოძრაობაზე. ან სისტემა. ენერგიაარის ფიზიკური სისტემის შესრულების უნარის საზომი მუშაობა,მაშასადამე, რაოდენობრივად ენერგია და შრომა ერთსა და იმავე ერთეულებშია გამოხატული.
გამოვლენილია მექანიკური მუშაობა და მექანიკური ენერგია.
Ძალა- ფიზიკური რაოდენობა, რომელიც ტოლია გარკვეული პერიოდის განმავლობაში შესრულებული სამუშაოს თანაფარდობას დროის ამ მონაკვეთთან.
Კინეტიკური ენერგია- მექანიკური სისტემის ენერგია, რაც დამოკიდებულია მისი წერტილების მოძრაობის სიჩქარეზე. მთარგმნელობითი და ბრუნვითი მოძრაობის კინეტიკური ენერგია ხშირად თავისუფლდება. SI საზომი ერთეული არის ჯოული, უფრო მკაცრად კინეტიკური ენერგია არის სხვაობა სისტემის მთლიან ენერგიასა და დასვენების ენერგიას შორის; ამრიგად, კინეტიკური ენერგია არის მთლიანი ენერგიის ნაწილი მოძრაობის გამო.
Პოტენციური ენერგია- სკალარული ფიზიკური სიდიდე, რომელიც ახასიათებს გარკვეული სხეულის (ან მატერიალური წერტილის) მუშაობის უნარს ძალების მოქმედების ველში მდებარეობის გამო. პოტენციური ენერგიის სწორი განმარტება შესაძლებელია მხოლოდ ძალების ველში, რომლის მუშაობა დამოკიდებულია მხოლოდ სხეულის საწყის და საბოლოო პოზიციაზე, მაგრამ არა მისი მოძრაობის ტრაექტორიაზე. ასეთ ძალებს კონსერვატიულს უწოდებენ.პოტენციური ენერგია ასევე დამახასიათებელია რამდენიმე სხეულის ან სხეულისა და ველის ურთიერთქმედებისას.ნებისმიერი ფიზიკური სისტემა მიდრეკილია ყველაზე დაბალი პოტენციური ენერგიის მქონე მდგომარეობისკენ. ზედაპირთან ახლოს დედამიწის გრავიტაციულ ველში პოტენციური ენერგია დაახლოებით გამოიხატება ფორმულით:
სადაც Ep არის სხეულის პოტენციური ენერგია, m არის სხეულის მასა, g არის სიმძიმის აჩქარება, h არის სხეულის მასის ცენტრის სიმაღლე თვითნებურად არჩეულ ნულოვან დონეზე.
პოტენციური ენერგიის ცნების ფიზიკური მნიშვნელობის შესახებ
თუ კინეტიკური ენერგიის დადგენა შესაძლებელია ერთი ინდივიდუალური სხეულისთვის, მაშინ პოტენციური ენერგია ყოველთვის ახასიათებს მინიმუმ ორ სხეულს ან სხეულის პოზიციას გარე ველში.
კინეტიკური ენერგია ხასიათდება სიჩქარით; პოტენციალი - სხეულების ფარდობითი პოზიციით.
მთავარი ფიზიკური მნიშვნელობა არ არის თავად პოტენციური ენერგიის ღირებულება, არამედ მისი ცვლილება.
8) ფიზიკაში მექანიკური ენერგია აღწერს პოტენციური და კინეტიკური ენერგიის ჯამს, რომელიც ხელმისაწვდომია მექანიკური სისტემის კომპონენტებში. მექანიკური ენერგია არის ენერგია, რომელიც დაკავშირებულია ობიექტის მოძრაობასთან ან მის პოზიციასთან. მექანიკური ენერგიის შენარჩუნების კანონიაცხადებს, რომ თუ სხეულს ან სისტემას ექვემდებარება მხოლოდ კონსერვატიული ძალები, მაშინ ამ სხეულის ან სისტემის მთლიანი მექანიკური ენერგია მუდმივი რჩება. იზოლირებულ სისტემაში, სადაც მხოლოდ კონსერვატიული ძალები მოქმედებენ, მთლიანი მექანიკური ენერგია შენარჩუნებულია.
Დაკავშირებული ინფორმაცია.