§2.6 Kinetická energie. Kinetická energie Zákon zachování a přeměny energie
Energie je skalární fyzikální veličina, která je jednotnou mírou různých forem pohybu hmoty a mírou přechodu pohybu hmoty z jedné formy do druhé.
Pro charakterizaci různých forem pohybu hmoty jsou představeny odpovídající druhy energie, např.: mechanická, vnitřní, energie elektrostatické, intranukleární interakce atd.
Energie se řídí zákonem zachování, což je jeden z nejdůležitějších přírodních zákonů.
Mechanická energie E charakterizuje pohyb a interakci těles a je funkcí rychlostí a vzájemných poloh těles. Je rovna součtu kinetických a potenciálních energií.
Kinetická energie
Uvažujme případ, kdy hmotné těleso m existuje konstantní síla \(~\vec F\) (může být výslednicí více sil) a vektory síly \(~\vec F\) a posunutí \(~\vec s\) směřují podél jedné přímka v jednom směru. V tomto případě lze práci vykonanou silou definovat jako A = F∙s. Modul síly podle druhého Newtonova zákona je roven F = m∙a a posuvný modul s v rovnoměrně zrychleném přímočarém pohybu je spojen s moduly iniciály υ 1 a konečná υ 2 rychlosti a zrychlení A výraz \(~s = \frac(\upsilon^2_2 - \upsilon^2_1)(2a)\) .
Odtud se dáme do práce
\(~A = F \cdot s = m \cdot a \cdot \frac(\upsilon^2_2 - \upsilon^2_1)(2a) = \frac(m \cdot \upsilon^2_2)(2) - \frac (m \cdot \upsilon^2_1)(2)\) . (1)
Fyzikální veličina, která se rovná polovině součinu hmotnosti tělesa a druhé mocniny jeho rychlosti kinetickou energii těla.
Kinetická energie je znázorněna písmenem E k.
\(~E_k = \frac(m \cdot \upsilon^2)(2)\) . (2)
Pak lze rovnost (1) zapsat takto:
\(~A = E_(k2) - E_(k1)\) . (3)
Věta o kinetické energii
práce výsledných sil působících na těleso se rovná změně kinetické energie tělesa.
Protože se změna kinetické energie rovná práci síly (3), vyjadřuje se kinetická energie tělesa ve stejných jednotkách jako práce, tedy v joulech.
Je-li počáteční rychlost pohybu hmotného tělesa m je nula a těleso zvýší svou rychlost na hodnotu υ , pak se práce vykonaná silou rovná konečné hodnotě kinetické energie tělesa:
\(~A = E_(k2) - E_(k1)= \frac(m \cdot \upsilon^2)(2) - 0 = \frac(m \cdot \upsilon^2)(2)\) . (4)
Fyzikální význam kinetické energie
Kinetická energie tělesa pohybujícího se rychlostí v ukazuje, kolik práce musí vykonat síla působící na těleso v klidu, aby mu tuto rychlost udělila.
Potenciální energie
Potenciální energie je energie interakce mezi tělesy.
Potenciální energie tělesa zvednutého nad Zemí je energií interakce mezi tělesem a Zemí působením gravitačních sil. Potenciální energie elasticky deformovaného tělesa je energie vzájemného působení jednotlivých částí tělesa pružnými silami.
Potenciál jsou nazývány síla, jehož práce závisí pouze na počáteční a konečné poloze pohybujícího se hmotného bodu nebo tělesa a nezávisí na tvaru trajektorie.
V uzavřené trajektorii je práce vykonaná potenciální silou vždy nulová. Mezi potenciální síly patří gravitační síly, elastické síly, elektrostatické síly a některé další.
Síly, jejichž práce závisí na tvaru trajektorie, se nazývají nepotencionální. Když se hmotný bod nebo těleso pohybuje po uzavřené trajektorii, práce vykonaná nepotencionální silou se nerovná nule.
Potenciální energie interakce tělesa se Zemí
Pojďme najít práci vykonanou gravitací F t při pohybu hmotného tělesa m svisle dolů z výšky h 1 nad povrchem Země do výšky h 2 (obr. 1). Pokud rozdíl h 1 – h 2 je zanedbatelná ve srovnání se vzdáleností do středu Země, pak gravitační silou F t během pohybu těla lze považovat za konstantní a rovný mg.
Protože posunutí se shoduje ve směru s vektorem gravitace, práce vykonaná gravitací je rovna
\(~A = F \cdot s = m \cdot g \cdot (h_1 - h_2)\) . (5)
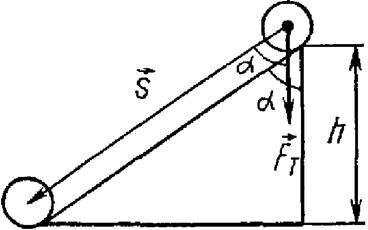
Uvažujme nyní pohyb tělesa po nakloněné rovině. Při pohybu tělesa po nakloněné rovině (obr. 2) působí gravitační síla F t = m∙g funguje
\(~A = m \cdot g \cdot s \cdot \cos \alpha = m \cdot g \cdot h\) , (6)
Kde h- výška nakloněné roviny, s– modul posunutí rovný délce nakloněné roviny.
Pohyb tělesa z bodu V přesně S po jakékoli trajektorii (obr. 3) si lze mentálně představit jako pohyb po úsecích nakloněných rovin s různou výškou h’, h'' atd. Práce A gravitace celou cestu od V PROTI S rovná se součtu prací na jednotlivých úsecích trasy:
\(~A = m \cdot g \cdot h" + m \cdot g \cdot h"" + \ldots + m \cdot g \cdot h^n = m \cdot g \cdot (h" + h"" + \ldots + h^n) = m \cdot g \cdot (h_1 - h_2)\), (7)
Kde h 1 a h 2 – výšky od povrchu Země, ve kterých se body nacházejí, resp V A S.

Rovnost (7) ukazuje, že gravitační práce nezávisí na dráze tělesa a je vždy rovna součinu tíhového modulu a rozdílu výšek v počáteční a koncové poloze.
Při pohybu dolů je práce gravitace kladná, při pohybu nahoru záporná. Práce vykonaná gravitací na uzavřené dráze je nulová.
Rovnost (7) může být reprezentována takto:
\(~A = - (m \cdot g \cdot h_2 - m \cdot g \cdot h_1)\) . (8)
Fyzikální veličina, která se rovná součinu hmotnosti tělesa modulem zrychlení volného pádu a výškou, do které je těleso zvednuto nad povrch Země, se nazývá potenciální energie interakce mezi tělem a Zemí.
Práce vykonávaná gravitací při pohybu hmotného tělesa m z bodu umístěného ve výšce h 2, do bodu umístěného ve výšce h 1 od povrchu Země, po libovolné trajektorii, se rovná změně potenciální energie interakce mezi tělesem a Zemí, brané s opačným znaménkem.
\(~A = - (E_(p2) - E_(p1))\) . (9)
Potenciální energie je označena písmenem E p.
Hodnota potenciální energie tělesa vyvýšeného nad Zemí závisí na volbě nulové úrovně, tedy výšky, ve které se předpokládá, že potenciální energie je nulová. Obvykle se předpokládá, že potenciální energie tělesa na povrchu Země je nulová.
S touto volbou nulové úrovně, potenciální energie E p tělesa umístěného ve výšce h nad povrchem Země, rovnající se součinu hmotnosti m tělesa modulem tíhového zrychlení G a vzdálenost h to z povrchu Země:
\(~E_p = m \cdot g \cdot h\) . (10)
Fyzikální význam potenciální energie interakce tělesa se Zemí
potenciální energie tělesa, na které působí gravitace, se rovná práci, kterou gravitace vykoná při pohybu tělesa na nulovou úroveň.
Na rozdíl od kinetické energie translačního pohybu, která může mít pouze kladné hodnoty, může být potenciální energie tělesa kladná i záporná. Tělesná hmota m, umístěný ve výšce h, Kde h < h 0 (h 0 – nulová výška), má negativní potenciální energii:
\(~E_p = -m \cdot g \cdot h\) .
Potenciální energie gravitační interakce
Potenciální energie gravitační interakce soustavy dvou hmotných bodů s hmotami m A M, umístěný na dálku r jeden od druhého je stejný
\(~E_p = G \cdot \frac(M \cdot m)(r)\) . (jedenáct)
Kde G je gravitační konstanta a nula referenční potenciální energie ( E p = 0) přijato v r = ∞.
Potenciální energie gravitační interakce tělesa s hmotou m se Zemí, kde h- výška tělesa nad povrchem Země, M e – hmotnost Země, R e je poloměr Země a nula potenciální energie je zvolena jako u h = 0.
\(~E_e = G \cdot \frac(M_e \cdot m \cdot h)(R_e \cdot (R_e +h))\) . (12)
Za stejné podmínky výběru nulové reference, potenciální energie gravitační interakce tělesa s hmotou m se Zemí pro nízké nadmořské výšky h (h « R e) rovné
\(~E_p = m \cdot g \cdot h\) ,
kde \(~g = G \cdot \frac(M_e)(R^2_e)\) je modul gravitačního zrychlení blízko zemského povrchu.
Potenciální energie elasticky deformovaného tělesa
Vypočítejme práci, kterou vykoná pružná síla, když se deformace (prodloužení) pružiny změní od určité počáteční hodnoty X 1 na konečnou hodnotu X 2 (obr. 4, b, c).

Pružná síla se mění s deformací pružiny. Chcete-li zjistit práci vykonanou pružnou silou, můžete vzít průměrnou hodnotu modulu síly (protože pružná síla závisí lineárně na X) a vynásobte modulem posunutí:
\(~A = F_(upr-cp) \cdot (x_1 - x_2)\) , (13)
kde \(~F_(upr-cp) = k \cdot \frac(x_1 - x_2)(2)\) . Odtud
\(~A = k \cdot \frac(x_1 - x_2)(2) \cdot (x_1 - x_2) = k \cdot \frac(x^2_1 - x^2_2)(2)\) nebo \(~A = -\left(\frac(k \cdot x^2_2)(2) - \frac(k \cdot x^2_1)(2) \right)\) . (14)
Fyzikální veličina, která se rovná polovině součinu tuhosti tělesa se čtvercem jeho deformace potenciální energie elasticky deformované tělo:
\(~E_p = \frac(k \cdot x^2)(2)\) . (15)
Ze vzorců (14) a (15) vyplývá, že práce pružné síly se rovná změně potenciální energie elasticky deformovaného tělesa, brané s opačným znaménkem:
\(~A = -(E_(p2) - E_(p1))\) . (16)
Li X 2 = 0 a X 1 = X, pak, jak je vidět ze vzorců (14) a (15),
\(~E_p = A\) .
Fyzikální význam potenciální energie deformovaného tělesa
potenciální energie pružně deformovaného tělesa se rovná práci vykonané pružnou silou při přechodu tělesa do stavu, kdy je deformace nulová.
Potenciální energie charakterizuje interagující tělesa a kinetická energie charakterizuje pohybující se tělesa. Potenciální i kinetická energie se mění pouze v důsledku takové interakce těles, kdy síly působící na tělesa působí jinak než nulově. Zamysleme se nad otázkou energetických změn při interakcích těles tvořících uzavřený systém.
Uzavřený systém- jedná se o systém, na který nepůsobí vnější síly nebo je působení těchto sil kompenzováno. Jestliže několik těles na sebe vzájemně působí pouze gravitačními a pružnými silami a nepůsobí na ně žádné vnější síly, pak pro jakékoli interakce těles je práce pružných nebo gravitačních sil rovna změně potenciální energie těles, odečtené s opačným znaménkem:
\(~A = -(E_(p2) - E_(p1))\) . (17)
Podle věty o kinetické energii se práce vykonaná stejnými silami rovná změně kinetické energie:
\(~A = E_(k2) - E_(k1)\) . (18)
Z porovnání rovností (17) a (18) je zřejmé, že změna kinetické energie těles v uzavřené soustavě se v absolutní hodnotě rovná změně potenciální energie soustavy těles a má opačné znaménko:
\(~E_(k2) - E_(k1) = -(E_(p2) - E_(p1))\) nebo \(~E_(k1) + E_(p1) = E_(k2) + E_(p2) \) . (19)
Zákon zachování energie v mechanických procesech:
součet kinetické a potenciální energie těles, která tvoří uzavřený systém a vzájemně na sebe působí gravitačními a elastickými silami, zůstává konstantní.
Součet kinetické a potenciální energie těles se nazývá celková mechanická energie.
Pojďme si dát jednoduchý experiment. Hodíme ocelovou kouli nahoru. Zadáním počáteční rychlosti υ palce jí dáme kinetickou energii, a proto začne stoupat nahoru. Působení gravitace vede ke snížení rychlosti míče, a tím i jeho kinetické energie. Míč ale stoupá výš a výš a získává stále více potenciální energie ( E p = m∙g∙h). Kinetická energie tedy nezmizí beze stopy, ale přemění se na potenciální energii.
V okamžiku dosažení nejvyššího bodu trajektorie ( υ = 0) míč je zcela zbaven kinetické energie ( E k = 0), ale zároveň se jeho potenciální energie stává maximální. Poté míč změní směr a se zvyšující se rychlostí se pohybuje dolů. Nyní se potenciální energie přemění zpět na kinetickou energii.
Odhaluje zákon zachování energie fyzický význam koncepty práce:
práce gravitačních a elastických sil se na jedné straně rovná nárůstu kinetické energie a na druhé straně poklesu potenciální energie těles. Práce se tedy rovná energii přeměněné z jednoho druhu na druhý.
Zákon o změně mechanické energie
Pokud systém interagujících těles není uzavřený, pak se jeho mechanická energie nešetří. Změna mechanické energie takového systému se rovná práci vnějších sil:
\(~A_(vn) = \Delta E = E - E_0\) . (20)
Kde E A E 0 – celkové mechanické energie systému v konečném a počátečním stavu.
Příkladem takového systému je systém, ve kterém spolu s potenciálními silami působí i síly nepotencionální. Mezi nepotencionální síly patří třecí síly. Ve většině případů, kdy úhel mezi třecí silou F r tělo je π radiánů, práce vykonaná třecí silou je záporná a rovná se
\(~A_(tr) = -F_(tr) \cdot s_(12)\) ,
Kde s 12 – dráha těla mezi body 1 a 2.
Třecí síly při pohybu systému snižují jeho kinetickou energii. V důsledku toho mechanická energie uzavřeného nekonzervativního systému vždy klesá a mění se v energii nemechanických forem pohybu.
Například auto pohybující se po vodorovném úseku silnice po vypnutí motoru ujede určitou vzdálenost a zastaví se vlivem třecích sil. Kinetická energie dopředného pohybu vozu se stala nulovou a potenciální energie se nezvýšila. Když auto brzdilo, zahřívaly se brzdové destičky, pneumatiky a asfalt. V důsledku působení třecích sil tedy kinetická energie vozu nezmizela, ale přeměnila se ve vnitřní energii tepelného pohybu molekul.
Zákon zachování a přeměny energie
Při jakékoli fyzické interakci se energie přeměňuje z jedné formy do druhé.
Někdy úhel mezi třecí silou F tr a elementární posunutí Δ r se rovná nule a práce třecí síly je kladná:
\(~A_(tr) = F_(tr) \cdot s_(12)\) ,
Příklad 1. Nechte vnější sílu F působí na blok V, který se dá na vozíku klouzat D(obr. 5). Pokud se vozík pohne doprava, pak práci vykoná posuvná třecí síla F tr2 působící na vozík ze strany bloku je kladný:

Příklad 2. Když se kolo odvaluje, jeho valivá třecí síla směřuje podél pohybu, protože bod kontaktu kola s vodorovným povrchem se pohybuje ve směru opačném ke směru pohybu kola a práce třecí síly je kladná. (obr. 6):

Literatura
- Kabardin O.F. Fyzika: Reference. materiály: Učebnice. manuál pro studenty. – M.: Vzdělávání, 1991. – 367 s.
- Kikoin I.K., Kikoin A.K. Fyzika: Učebnice. pro 9. třídu. prům. škola – M.: Prosveshchenie, 1992. – 191 s.
- Učebnice elementární fyziky: Proc. příspěvek. Ve 3 svazcích / Ed. G.S. Landsberg: díl 1. Mechanika. Teplo. Molekulární fyzika. – M.: Fizmatlit, 2004. – 608 s.
- Yavorsky B.M., Seleznev Yu.A. Referenční příručka fyziky pro ty, kteří vstupují na univerzity a do sebevzdělávání. – M.: Nauka, 1983. – 383 s.
S pojmem práce úzce souvisí další základní fyzikální pojem – pojem energie. Protože mechanika studuje zaprvé pohyb těles a zadruhé vzájemnou interakci těles, je obvyklé rozlišovat mezi dvěma typy mechanické energie: Kinetická energie, způsobené pohybem těla, a potenciální energie, způsobené interakcí tělesa s jinými tělesy.
Kinetická energie mechanický systém zvané energiev závislosti na rychlosti pohybu bodů tohoto systému.
Výraz pro kinetickou energii lze nalézt určením práce výsledné síly působící na hmotný bod. Na základě (2.24) napíšeme vzorec pro elementární práci výsledné síly:
Protože  , pak dA = mυdυ. (2,25)
, pak dA = mυdυ. (2,25)
Abychom našli práci, kterou vykoná výsledná síla, když se rychlost tělesa změní z υ 1 na υ 2, integrujeme výraz (2.29):
 (2.26)
(2.26)
Protože práce je mírou přenosu energie z jednoho těla do druhého
Na základě (2.30) píšeme, že množství  existuje kinetická energie
existuje kinetická energie
tělo:  odkud místo (1.44) dostáváme
odkud místo (1.44) dostáváme
 (2.27)
(2.27)
Obvykle se nazývá věta vyjádřená vzorcem (2.30). věta o kinetické energii . V souladu s ní je práce sil působících na těleso (nebo soustavu těles) rovna změně kinetické energie tohoto tělesa (nebo soustavy těles).
Z věty o kinetické energii to vyplývá fyzikální význam kinetické energie : Kinetická energie tělesa se rovná práci, kterou je schopno vykonat při snižování své rychlosti na nulu.Čím větší „rezervu“ kinetické energie těleso má, tím více práce může vykonat.
Kinetická energie systému je rovna součtu kinetických energií hmotných bodů, ze kterých se tento systém skládá:
 (2.28)
(2.28)
Je-li práce všech sil působících na těleso kladná, pak kinetická energie tělesa roste, je-li práce záporná, pak kinetická energie klesá;
Je zřejmé, že elementární práce výslednice všech sil působících na těleso bude rovna elementární změně kinetické energie tělesa:
dA = dE k (2,29)
Na závěr poznamenáváme, že kinetická energie, stejně jako rychlost pohybu, je relativní. Například kinetická energie cestujícího sedícího ve vlaku bude jiná, vezmeme-li v úvahu pohyb vzhledem k povrchu vozovky nebo vzhledem k vozu.
§2.7 Potenciální energie
Druhým typem mechanické energie je potenciální energie – energie způsobená vzájemným působením těles.
Potenciální energie necharakterizuje žádnou interakci těles, ale pouze tu, která je popsána silami nezávislými na rychlosti. Většina sil (gravitace, pružnost, gravitační síly atd.) je takových; jedinou výjimkou jsou třecí síly. Práce uvažovaných sil nezávisí na tvaru trajektorie, ale je určena pouze její počáteční a konečnou polohou. Práce vykonaná takovými silami na uzavřené dráze je nulová.
Síly, jejichž práce nezávisí na tvaru trajektorie, ale závisí pouze na počáteční a konečné poloze hmotného bodu (tělesa), se nazývají potenciální nebo konzervativní síly .
Pokud těleso interaguje se svým prostředím prostřednictvím potenciálních sil, pak může být pro charakterizaci této interakce zaveden koncept potenciální energie.
Potenciál je energie způsobená interakcí těles a v závislosti na jejich vzájemné poloze.
Pojďme najít potenciální energii tělesa zvednutého nad zemí. Nechť se těleso o hmotnosti m rovnoměrně pohybuje v gravitačním poli z polohy 1 do polohy 2 po ploše, jejíž průřez rovinou výkresu je znázorněn na Obr. 2.8. Tento úsek je trajektorií hmotného bodu (tělesa). Pokud nedochází k tření, působí na bod tři síly:
1) síla N od povrchu je kolmá k povrchu, práce této síly je nulová;
2) gravitace mg, práce této síly A 12;
3) tažná síla F od nějakého hnacího tělesa (spalovací motor, elektromotor, osoba atd.); Označme práci této síly A T.
Uvažujme práci gravitace při pohybu tělesa po nakloněné rovině délky ℓ (obr. 2.9). Jak je vidět z tohoto obrázku, práce se rovná
A" = mgℓ cosα = mgℓ cos(90° + α) = - mgℓ sinα
Z trojúhelníku ВСD máme ℓ sinα = h, takže z posledního vzorce vyplývá:
Dráhu tělesa (viz obr. 2.8) lze schematicky znázornit malými řezy nakloněné roviny, proto pro práci gravitace na celé dráze 1 -2 platí následující výraz:
A12 = mg (h1-h2) =-(mgh2 - mg h1) (2,30)
Tak, gravitační práce nezávisí na dráze tělesa, ale závisí na rozdílu výšek počátečního a koncového bodu dráhy.
Velikost
ep = mg h (2,31)
volal potenciální energie hmotný bod (těleso) o hmotnosti m vyvýšený nad zemí do výšky h. Proto lze vzorec (2.30) přepsat následovně:
A 12 = =-(En 2 - En 1) nebo A 12 = =-ΔEn (2,32)
Gravitační práce se rovná změně potenciální energie těles odebrané s opačným znaménkem, tedy rozdílu mezi její konečnou a počátečníhodnoty (věta o potenciální energii ).
Podobné úvahy lze uvést pro elasticky deformované těleso.
 (2.33)
(2.33)
Všimněte si, že rozdíl v potenciálních energiích má fyzikální význam jako veličina, která určuje práci konzervativních sil. V tomto ohledu nezáleží na tom, které poloze, konfiguraci by měla být připsána nulová potenciální energie.
Z věty o potenciální energii lze získat jeden velmi důležitý důsledek: Konzervativní síly jsou vždy zaměřeny na snižování potenciální energie. Zavedený vzorec se projevuje v tom, že každý systém ponechaný sám sobě má vždy tendenci přejít do stavu, ve kterém má jeho potenciální energie nejmenší hodnotu. Tohle je princip minimální potenciální energie .
Pokud systém v daném stavu nemá minimální potenciální energii, pak se tento stav nazývá energeticky nevýhodné.
Pokud je koule na dně konkávní misky (obr. 2.10, a), kde je její potenciální energie minimální (ve srovnání s jejími hodnotami v sousedních polohách), je její stav příznivější. Rovnováha koule v tomto případě je udržitelného: Pokud posunete míč do strany a uvolníte jej, vrátí se do původní polohy.
Například poloha koule na vrcholu konvexní plochy je energeticky nepříznivá (obr. 2.10, b). Součet sil působících na kouli je nulový, a proto bude tato koule v rovnováze. Tato rovnováha však je nestabilní: stačí sebemenší náraz, aby se sroloval dolů a tím se posunul do stavu energeticky příznivějšího, tzn. mít méně
P  potenciální energie.
potenciální energie.
Na lhostejný V rovnováze (obr. 2.10, c) je potenciální energie tělesa rovna potenciální energii všech jeho možných nejbližších stavů.
Na obrázku 2.11 můžete označit nějakou omezenou oblast prostoru (například cd), ve které je potenciální energie menší než mimo ni. Tato oblast byla pojmenována potenciální studna .
Pokud je elementární posunutí d zapsáno ve tvaru:
Podle Newtonova II zákona:
Veličina se nazývá kinetická energie
Práce výslednice všech sil působících na částici je rovna změně kinetické energie částice.
nebo jiný záznam
kinetický disipativní skalární fyzikální
Pokud A > 0, pak se WC zvyšuje (klesá)
Pokud A > 0, pak WC klesá (házení).
Pohybující se tělesa mají schopnost konat práci, i když na ně nepůsobí žádné síly z jiných těles. Pohybuje-li se těleso konstantní rychlostí, pak je součet všech sil působících na těleso roven 0 a není vykonána žádná práce. Působí-li těleso nějakou silou ve směru pohybu na jiné těleso, pak je schopno konat práci. V souladu s třetím Newtonovým zákonem bude na pohybující se těleso působit stejně velká síla, ale namířená v opačném směru. Díky působení této síly se bude rychlost těla snižovat až do úplného zastavení. Energie WC způsobená pohybem tělesa se nazývá kinetická. Zcela zastavené tělo nemůže dělat žádnou práci. WC závisí na rychlosti a tělesné hmotnosti. Změna směru rychlosti neovlivňuje kinetickou energii.
Energie je skalární veličina. Jednotkou energie v SI je Joule.
Kinetická a potenciální energie
Existují dva druhy energie – kinetická a potenciální.
DEFINICE
Kinetická energie- toto je energie, kterou tělo disponuje díky svému pohybu:
DEFINICE
Potenciální energie je energie, která je určena vzájemnou polohou těles, jakož i povahou interakčních sil mezi těmito tělesy.
Potenciální energie v gravitačním poli Země je energie způsobená gravitační interakcí tělesa se Zemí. Je určena polohou těla vzhledem k Zemi a rovná se práci, kterou tělo přesune z dané polohy do nulové úrovně:
Potenciální energie je energie způsobená vzájemným působením částí těla. Rovná se práci vnějších sil v tahu (stlačení) nedeformované pružiny o velikost:
Těleso může mít současně kinetickou i potenciální energii.
Celková mechanická energie tělesa nebo soustavy těles se rovná součtu kinetických a potenciálních energií tělesa (soustavy těles):
Zákon zachování energie
Pro uzavřenou soustavu těles platí zákon zachování energie:
V případě, kdy na těleso (nebo soustavu těles) působí např. vnější síly, není splněn zákon zachování mechanické energie. V tomto případě je změna celkové mechanické energie tělesa (systém těles) rovna vnějším silám:
Zákon zachování energie nám umožňuje vytvořit kvantitativní spojení mezi různými formami pohybu hmoty. Stejně jako platí nejen pro, ale i pro všechny přírodní jevy. Zákon zachování energie říká, že energii v přírodě nelze zničit, stejně jako ji nelze vytvořit z ničeho.
Ve své nejobecnější podobě lze zákon zachování energie formulovat takto:
- Energie v přírodě nemizí a znovu se nevytváří, ale pouze se přeměňuje z jednoho typu na druhý.
Příklady řešení problémů
PŘÍKLAD 1
| Cvičení | Střela letící rychlostí 400 m/s narazí na hliněnou šachtu a dorazí 0,5 m k zastavení Určete odpor šachty proti pohybu střely, je-li její hmotnost 24 g. |
| Řešení | Odporová síla hřídele je vnější silou, takže práce vykonaná touto silou se rovná změně kinetické energie střely: Vzhledem k tomu, že odporová síla hřídele je opačná ke směru pohybu střely, práce vykonaná touto silou je: Změna kinetické energie střely: Můžeme tedy napsat: odkud pochází odporová síla hliněného valu: Převeďme jednotky do soustavy SI: g kg. Vypočítejme odporovou sílu: |
| Odpovědět | Odporová síla hřídele je 3,8 kN. |
PŘÍKLAD 2
| Cvičení | Břemeno o hmotnosti 0,5 kg dopadá z určité výšky na desku o hmotnosti 1 kg, upevněnou na pružině s koeficientem tuhosti 980 N/m. Určete velikost největšího stlačení pružiny, jestliže v okamžiku nárazu mělo zatížení rychlost 5 m/s. Náraz je nepružný. |
| Řešení | Zapišme si zatížení + desku pro uzavřený systém. Vzhledem k tomu, že náraz je nepružný, máme: odkud se bere rychlost desky se zátěží po nárazu:
Podle zákona zachování energie je celková mechanická energie zátěže spolu s deskou po nárazu rovna potenciální energii stlačené pružiny: |

První Newtonův zákon předpokládá přítomnost takového jevu, jako je setrvačnost těles. Proto je také známý jako zákon setrvačnosti. Setrvačnost je jev tělesa, které si udržuje rychlost pohybu (ve velikosti i směru), když na těleso nepůsobí žádné síly. Pro změnu rychlosti pohybu je třeba na tělo působit určitou silou. Přirozeně, že výsledek působení sil stejné velikosti na různá tělesa bude různý. Říká se tedy, že tělesa mají setrvačnost. Setrvačnost je vlastnost těles odolávat změnám v jejich aktuálním stavu. Velikost setrvačnosti je charakterizována tělesnou hmotností. Existují takové referenční systémy, nazývané inerciální, vůči nimž si hmotný bod za nepřítomnosti vnějších vlivů zachovává velikost a směr své rychlosti neomezeně dlouho.
Druhý Newtonův zákon je diferenciální pohybový zákon, který popisuje vztah mezi silou působící na hmotný bod a výsledným zrychlením tohoto bodu. Ve skutečnosti druhý Newtonův zákon zavádí hmotnost jako míru projevu setrvačnosti hmotného bodu ve vybrané inerciální referenční soustavě (IFR). V inerciální vztažné soustavě je zrychlení, které hmotný bod přijímá, přímo úměrné výslednici všech sil na něj působících a nepřímo úměrné jeho hmotnosti.
Zákon třetin Tento zákon vysvětluje, co se stane se dvěma interagujícími tělesy. Vezměme si například uzavřený systém sestávající ze dvou těles. První těleso může působit na druhé nějakou silou a druhé může působit na první silou. Jak se porovnávají síly? Třetí Newtonův zákon říká: akční síla je stejně velká a má opačný směr než reakční síla. Zdůrazněme, že tyto síly působí na různá tělesa, a proto nejsou vůbec kompenzovány. Akce má vždy stejnou a opačnou reakci, jinak jsou vzájemné interakce dvou těles na sobě stejné a směrované v opačných směrech.
4 ) Princip relativity- základní fyzikální princip, podle kterého všechny fyzikální procesy v inerciálních vztažných soustavách probíhají stejně, bez ohledu na to, zda je soustava stacionární nebo ve stavu rovnoměrného a přímočarého pohybu.
Z toho vyplývá, že všechny přírodní zákony jsou stejné ve všech inerciálních vztažných soustavách.
Existuje rozdíl mezi Einsteinovým principem relativity (který je uveden výše) a Galileovým principem relativity, který tvrdí totéž, ale ne pro všechny přírodní zákony, ale pouze pro zákony klasické mechaniky, z čehož vyplývá použitelnost Galileových transformací. , ponechává otevřenou otázku aplikovatelnosti principu relativity na optiku a elektrodynamiku .
V moderní literatuře se princip relativity ve své aplikaci na inerciální vztažné soustavy (nejčastěji při absenci gravitace nebo při jejím zanedbání) obvykle terminologicky objevuje jako Lorentzova kovariance (nebo Lorentzova invariance).
5)Síly v přírodě.
Navzdory rozmanitosti sil existují pouze čtyři typy interakcí: gravitační, elektromagnetické, silné a slabé.
Gravitační síly se znatelně projevují v kosmickém měřítku. Jedním z projevů gravitačních sil je volný pád těles. Země uděluje všem tělesům stejné zrychlení, které se nazývá gravitační zrychlení g. Mírně se liší v závislosti na zeměpisné šířce. V zeměpisné šířce Moskvy je to 9,8 m/s2.
Mezi částicemi, které mají elektrický náboj, působí elektromagnetické síly. Silné a slabé interakce se projevují uvnitř atomových jader a při jaderných přeměnách.
Gravitační interakce existuje mezi všemi tělesy s hmotností. Zákon univerzální gravitace, který objevil Newton, říká:
Síla vzájemné přitažlivosti mezi dvěma tělesy, která lze považovat za hmotné body, je přímo úměrná součinu jejich hmotností a nepřímo úměrná druhé mocnině vzdálenosti mezi nimi:
Koeficient úměrnosti y se nazývá gravitační konstanta. Je roven 6,67 10-11 N m2/kg2.
Pokud na těleso působí pouze gravitační síla ze Země, pak se rovná mg. Jedná se o gravitační sílu G (bez zohlednění rotace Země). Gravitační síla působí na všechna tělesa na Zemi bez ohledu na jejich pohyb.
Když se těleso pohybuje s gravitačním zrychlením (nebo dokonce s nižším zrychlením směřujícím dolů), je pozorován jev úplné nebo částečné beztíže.
Úplný stav beztíže - žádný tlak na stojan nebo gimbal. Hmotnost je síla tlaku tělesa na vodorovnou podpěru nebo tahová síla závitu od tělesa na ní zavěšeného, která vzniká v souvislosti s gravitační přitažlivostí tohoto tělesa k Zemi.
Přitažlivé síly mezi tělesy jsou nezničitelné, zatímco váha tělesa může zmizet. V satelitu, který se pohybuje únikovou rychlostí kolem Země, tedy neexistuje žádná hmotnost, stejně jako ve výtahu padajícím se zrychlením g.
Příklady elektromagnetických sil jsou síly tření a pružnosti. Existují kluzné třecí síly a valivé třecí síly. Kluzná třecí síla je mnohem větší než valivá třecí síla.
Třecí síla závisí v určitém intervalu na působící síle, která má tendenci pohybovat jedním tělesem vůči druhému. Působením síly různé velikosti uvidíme, že malé síly nemohou těleso pohnout. V tomto případě vzniká kompenzační síla statického tření.
Při absenci sil posouvajících těleso je statická třecí síla nulová. Statická třecí síla nabývá největšího významu v okamžiku, kdy se jedno těleso začne vůči druhému pohybovat. V tomto případě se statická třecí síla rovná kluzné třecí síle:
![]()
kde n je koeficient tření, N je síla normálního (kolmého) tlaku. Koeficient tření závisí na látce třecích ploch a jejich drsnosti.
6) Zákon zachování hybnosti ( Zákon zachování hybnosti) říká, že vektorový součet impulsů všech těles (nebo částic) uzavřeného systému je konstantní veličina.
V klasické mechanice je zákon zachování hybnosti obvykle odvozen jako důsledek Newtonových zákonů. Z Newtonových zákonů lze ukázat, že při pohybu v prázdném prostoru se hybnost zachovává v čase a za přítomnosti interakce je rychlost její změny určena součtem působících sil.
Jako každý ze základních zákonů zachování popisuje zákon zachování hybnosti jednu ze základních symetrií – homogenitu prostoru.
Těžiště v mechanice- jedná se o geometrický bod, který charakterizuje pohyb tělesa nebo soustavy částic jako celku. Pojem těžiště je ve fyzice široce používán.
Pohyb tuhého tělesa lze považovat za superpozici pohybu těžiště a rotačního pohybu tělesa kolem jeho těžiště. V tomto případě se těžiště pohybuje stejně jako těleso se stejnou hmotností, ale pohybovalo by se nekonečně malých rozměrů (hmotný bod). To zejména znamená, že pro popis tohoto pohybu platí všechny Newtonovy zákony. V mnoha případech můžete velikost a tvar tělesa zcela ignorovat a uvažovat pouze pohyb jeho těžiště Často je vhodné uvažovat pohyb uzavřené soustavy v referenční soustavě spojené s těžištěm. Takový referenční systém se nazývá systém těžiště (C-systém) nebo systém setrvačnosti. V něm zůstává celková hybnost uzavřeného systému vždy rovna nule, což umožňuje zjednodušit rovnice jeho pohybu.
Energie- skalární fyzikální veličina, která je jednotnou mírou různých forem pohybu hmoty a mírou přechodu pohybu hmoty z jedné formy do druhé. Mechanické práce je fyzikální veličina, která je skalárním kvantitativním měřítkem působení síly nebo sil na těleso nebo soustavu v závislosti na číselné velikosti a směru působení síly (síly) a na pohybu bodu (bodů) tělesa. nebo systém. Energie je měřítkem schopnosti fyzického systému fungovat práce, Energie a práce jsou tedy kvantitativně vyjádřeny ve stejných jednotkách.
Identifikuje se mechanická práce a mechanická energie.
Napájení- fyzikální veličina rovnající se poměru práce vykonané za určité časové období k tomuto časovému úseku.
Kinetická energie- energie mechanické soustavy v závislosti na rychlosti pohybu jejích bodů. Často se uvolňuje kinetická energie translačního a rotačního pohybu. Jednotkou Sie měření je Joule Přesněji řečeno, kinetická energie je rozdíl mezi celkovou energií systému a jeho klidovou energií. Kinetická energie je tedy částí celkové energie způsobené pohybem.
Potenciální energie- skalární fyzikální veličina, která charakterizuje schopnost určitého tělesa (nebo hmotného bodu) konat práci díky jeho umístění v poli působení sil. Správnou definici potenciální energie lze podat pouze v poli sil, jehož práce závisí pouze na počáteční a konečné poloze tělesa, nikoli však na trajektorii jeho pohybu. Takové síly se nazývají konzervativní. Je to také charakteristika interakce několika těles nebo tělesa a pole. Jakýkoli fyzikální systém směřuje ke stavu s nejnižší potenciální energií. Potenciální energie v gravitačním poli Země v blízkosti povrchu je přibližně vyjádřena vzorcem:
kde Ep je potenciální energie tělesa, m je hmotnost tělesa, g je tíhové zrychlení, h je výška těžiště tělesa nad libovolně zvolenou nulovou hladinou.
K fyzikálnímu významu pojmu potenciální energie
Pokud lze určit kinetickou energii pro jedno jednotlivé těleso, pak potenciální energie charakterizuje vždy alespoň dvě tělesa nebo polohu tělesa ve vnějším poli.
Kinetická energie je charakterizována rychlostí; potenciál - vzájemnou polohou těles.
Hlavním fyzikálním významem není samotná hodnota potenciální energie, ale její změna.
8) Ve fyzice mechanická energie popisuje součet potenciální a kinetické energie dostupné v komponentách mechanického systému. Mechanická energie je energie spojená s pohybem předmětu nebo jeho polohou. Zákon zachování mechanické energie uvádí, že pokud je těleso nebo systém vystaveno pouze konzervativním silám, pak celková mechanická energie tohoto tělesa nebo systému zůstává konstantní. V izolované soustavě, kde působí pouze konzervativní síly, se zachovává celková mechanická energie.
Související informace.



